")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,63 € d'éco-participation
![]()
Poppy est une plateforme open-source pour la création, l'utilisation et le partage d'objets robotiques interactifs. Elle s'adresse aux débutants comme aux experts, dans les domaines de l'éducation, de la science, de l'art, et plus généralement au monde des makers. Elle a été conçue comme un outil pour apprendre, créer et partager des idées et technologies liées au monde numérique.
La plateforme technologique Poppy est constituée de modèles matériels open-source (CC-BY-SA), d'une librairie logicielle Pypot open-source et basée sur le langage Python, et enfin d'un site web communautaire où chacun peut accéder aux documentations, tutoriaux, logiciels et simulateurs, et contribuer aux améliorations de la plateforme: http://www.poppy-project.org . Depuis 2017, le site web www.poppy-education.org regroupe toutes les ressources pédagogiques existantes sur le projet.
La plate-forme Poppy comprend actuellement trois robots :
L’écosystème Poppy, initialement développé et porté par l’ équipe Flowers de l’INRIA , a été transféré en 2018 à l’association Poppy Station . Celle-ci regroupe des acteurs du monde économique, de la recherche, de la formation, de la culture et de l’éducation qui partagent une vision commune : celle que « la robotique est une chance quand elle est maîtrisée et mise au service de l’homme ».
Génération Robots, distributeur historique des robots Poppy, fait partie des partenaires fondateurs de Poppy Station.
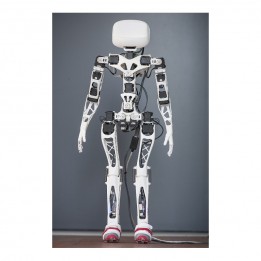
Poppy Torso correspond à la partie supérieure (tronc, tête et bras) du Poppy Humanoïde.

Poppy Torso représente un moindre investissement financier que le kit complet, et s’avère particulièrement intéressant dans le cas de projets sur la robotique humanoïde ne nécessitant pas de déplacement du robot (interaction homme-robot, modélisation de la mobilité des membres supérieurs...).
A titre d’exemple, le projet Cherry , monté par 4 étudiants de l’école ENSEIRB-MATMECA Bordeaux, au centre duquel on retrouve Poppy, version tête et torse. L’objectif de ce projet est l’étude et la création d’une solution innovante à la problématique de la scolarisation des enfants hospitalisés.
Ci-dessous, une vidéo de démonstration de Poppy Torso dans le cadre du projet Cherry :
Le robot étant open-source hardware et software, il vous est possible de concevoir des variations de celui-ci et de le faire évoluer au gré de vos besoins, scientifiques, éducatifs, ou artistiques.
Le projet Poppy a pour ambition de permettre à tout le monde de comprendre et de participer à la création du monde numérique qui nous entoure. Le robot Poppy est donc un outil de choix pour les éducateurs et les enseignants. Le robot Poppy a été utilisé avec succès dans des lycées et des écoles d'ingénieurs. Les étudiants, organisés en groupes, se focalisent sur des objectifs précis (le design d'une nouvelle partie mécanique, la construction d'une jambe, l'ajout de capteurs Arduino, la programmation de comportements spécifiques...) puis dans une démarche intégrative et collaborative, partagent leurs compétences et s'enrichissent mutuellement.
Le robot Poppy est particulièrement adapté aux associations de promotion de la science, les makers et autres FabLabs. Chacun peut participer au projet en partageant ses idées, des créations ou même en posant des questions sur la plate-forme de discussion : https://forum.poppy-project.org .
Timelapse de l'assemblage de Poppy (version Odroid)
La plateforme Poppy permet de partager du code ainsi que du design de robots. La plateforme Poppy a été conçue pour permettre aux chercheurs de reproduire et partager les résultats d'un autre laboratoire. En particulier, le robot Poppy, en raison de sa modularité, permet de tester plusieurs designs comme évoqué dans cet article . La vidéo suivante explique comment Poppy ouvre des possibilités scientifiques permettant d'explorer les mécanismes d'apprentissage et de développement :
L'application Poppy GRR, unique en son genre, a été développée au sein du GR Lab , le Bureau d'Etudes en Robotique de Service Professionnelle de Génération Robots .
Poppy GRR signifie Poppy Generation Robots Replayer . Elle permet d'enregistrer des mouvements, de les combiner et de les rejouer. Mais surtout, elle permet de créer des exercices et des séances complètes, qui peuvent ensuite être joués à tout moment, et ce de manière pratique. En effet, il est possible de mettre en pause la séance ou l'arrêter grâce à une interface graphique web .
En savoir plus sur l'application Poppy GRR
Je télécharge l'application Poppy GRR (version Bêta)
|
Des pièces de structure en 3D (non incluses dans ce kit) |
Une librairie logicielle de programmation  La librairie Pypot en Python pour programmer les robots réalisés à l'aide de la plateforme Poppy. Les robots Poppy sont également programmables visuellement à l'aide de SNAP! |
|
Des modèles disponibles pour les simulateurs  Un modèle de robot Poppy est disponible en simulation avec V-Rep. Le portage vers Gazebo est en cours. |
Une communauté active  La communauté des utilisateurs grandit chaque jour, comme en témoigne l'activité du forum et les usages autour des différents robots Poppy. |
En plus d'une programmation classique en Python, il est possible de programmer le robot en wifi à partir d'un simple browser web par le biais d'IPython.
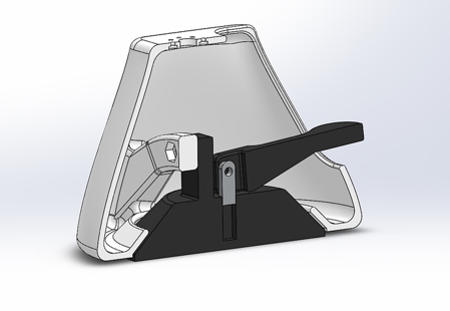
La version présentée ici (Poppy Torso) ne comprend pas les jambes de Poppy, et est donc parfaitement adaptée à des projets centrés autour d'un robot humanoïde n’ayant pas besoin de se déplacer. Le torse est fixé à une ventouse avec levier d’appui pour assurer une stabilité optimale. La ventouse et l’écrou de fixation nécessaires au maintien du torse de Poppy sont compris dans ce kit. Une pièce de structure imprimée en 3D et destinée à recouvrir la ventouse pour donner à l’ensemble une belle finition est également incluse.
Ci-dessous une image en coupe du dispositif ventouse + pièce de structure :
Il possède une carte Raspberry Pi 3 modèle B+ dans la tête, permettant d'embarquer vos programmes et de communiquer en Wifi et Ethernet. Une caméra Raspberry placée dans la tête permet de réaliser des programmes utilisant la vision artificielle.
Le robot Poppy est livré complet et en kit. Il vous faudra le monter entièrement. Pour cela, vous trouverez à votre disposition les vidéos de montage en ligne . Attention, ces vidéos sont basées sur la version Odroid du robot, intégrant une carte Odroid XU4 à la place de la carte Raspberry Pi. Cette version n’est plus disponible à la commercialisation. L’assemblage varie essentiellement au niveau de la tête et de la connectique.
La liste du matériel compris dans le kit est le suivant :
Les ressources suivantes vous aideront à démarrer l'assemblage et la programmation du robot Poppy Torso.
Suivez la procédure d'installation de la carte Odroid via ce lien.
Suivez la procédure de connexion à l'interface graphique via ce lien.
Le robot Poppy doit être connecté au réseau local via un câble ethernet, et être sur le même réseau que l'ordinateur utilisé. Si le robot est relié directement à l'ordinateur et non en passant par le réseau, il faut configurer l'ordinateur pour qu'il partage la connexion avec le robot. Pour plus de renseignements, vous pouvez consulter ce lien.
Vous pouvez la trouver dans la partie Simplement: utiliser la carte SD Poppy via ce lien.
Vous pouvez trouver toute la documentation de préparation du robot Poppy sur ce lien.
Vous pouvez trouver de nombreuses informations sur le forum Poppy. Si vos problèmes persistent, vous pouvez nous contacter. Vous pouvez retrouver le site sur ce lien.
")