Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
Les servomoteurs Dynamixel sont des actuateurs intégrés qui comprennent:
Les servomoteurs Dynamixel ont un identifiant unique et communiquent par paquets numériques.
Les principales caractéristiques de la gamme Dynamixel sont:
Cette vidéo illustre les capacités et les applications existantes des servomoteurs Dynamixel:
Les servomoteurs doivent être connecté à un contrôleur (CM-700, CM-5, CM-510, CM-530 ou OpenCM9.04) pour être pilotés. Les programmes sont fait avec RoboPlus, d'une manière très simple sans requérir beaucoup de connaissances préalables.
Les contrôleurs les plus récents supportent du langage C embarqué et il existe un SDK pour développer vos propres applications.
Le modèle Dynamixel MX-28 a été décliné en deux nouveaux modèles, le MX-28AT, qui conserve un protocole de communication série asynchrone semi-duplex et un lien physique TTL Multi Drop, alors que le MX-28R communique en utilisant le protocole RS485 et un bus multi drop RS485.
La série de servomoteurs MX de Dynamixel se distingue par de nouvelles fonctionnalités comme des fonctions avancées de contrôle PID, un contrôle de position à 360° et une communication à haute vitesse.
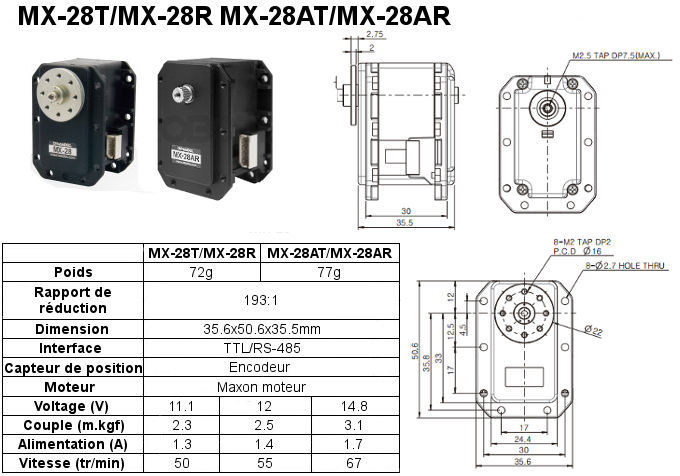
Le servomoteur MX-28AT Dynamixel est la version améliorée du modèle MX-28T, les principales améliorations apportées sont :
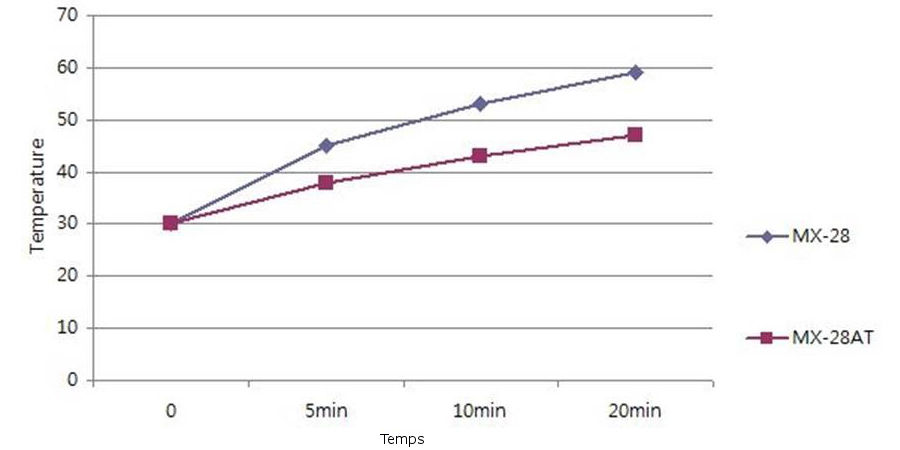
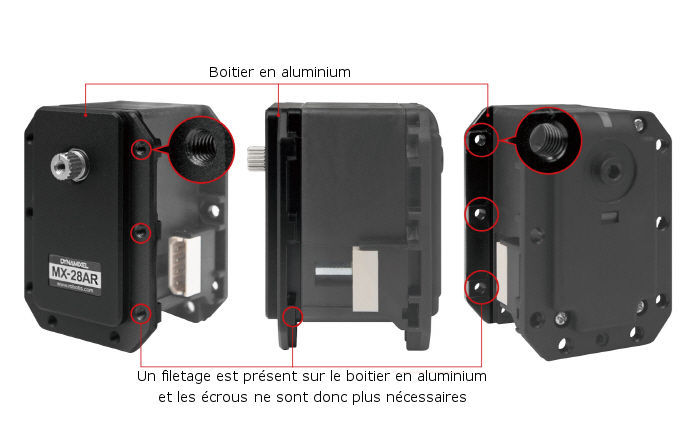
Le modèle MX-28AT est entièrement en aluminium, ce nouveau boîtier possède une meilleure répartition de la chaleur ce qui permet d’avoir une température plus basse que le MX-28T.
Il intègre également un nouveau système de fixation ; un filetage est présent sur le boîtier, les écrous ne sont donc plus nécessaires.
Toutes les spécifications techniques du servomoteur Dynamixel MX-28AT sont disponibles sur le site du constructeur à l'adresse suivante : http://support.robotis.com/en/product/dynamixel/mx_series/mx-28at_ar.htm
Ce document vous permet de comparer rapidement les caractéristiques des différents servomoteurs Dynamixel
 Spécifications comparées des servomoteurs Dynamixels |
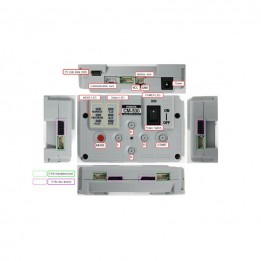
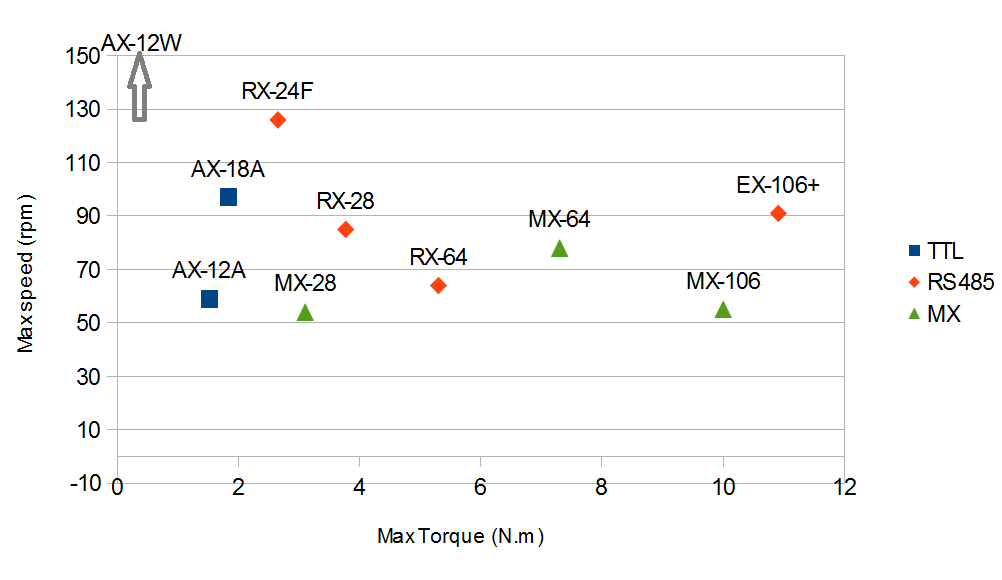
La figure suivante présente les caractéristiques techniques des différents servomoteurs Dynamixel et les positionnent les uns par rapport aux autres d'un point de vue de leur performance. Les servomoteurs sont différenciés selon leur type de communication (la série MX proposant les deux types de communication).
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.