




Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,63 € für die Ökosteuer
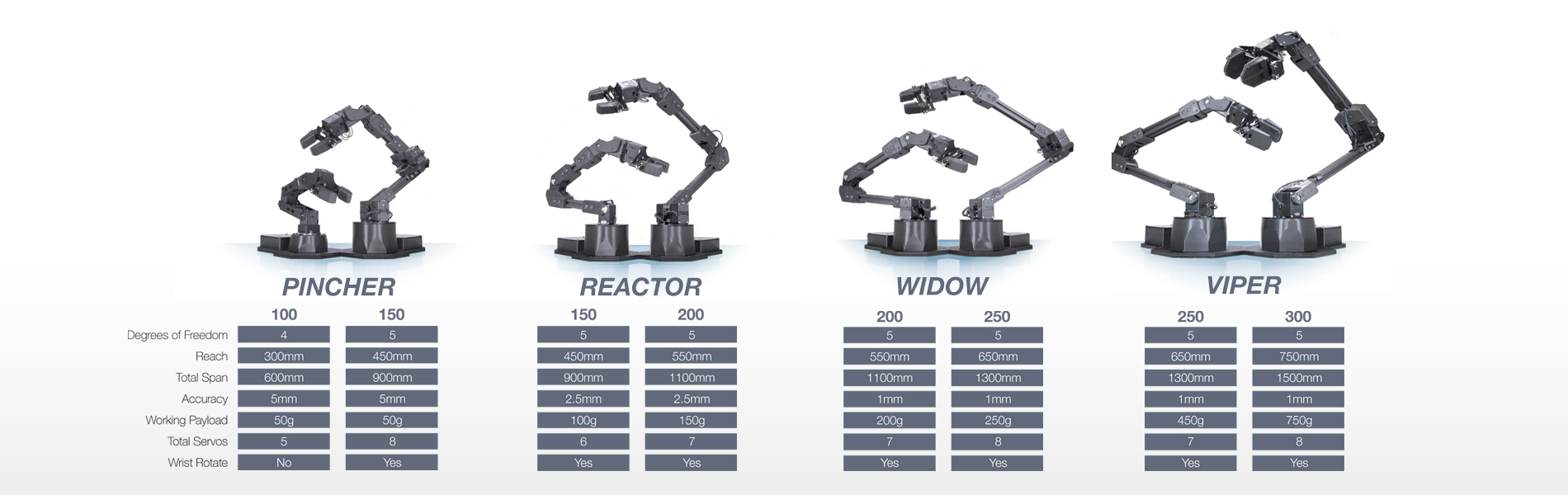
Nach dem Roboterarm WidowX 200 und dem 5-achsigen WidowX 250 ist Interbotix mit dem 6-achsigen Roboterarm WidowX 250 zurück. Für den Bau dieses mobilen Arms für Lehre und Forschung wurden 9 Dynamixel-Servomotoren der Serien XM und XL benötigt.
Der 6-achsige Roboterarm WidowX 250 bietet eine Gesamt-Spannweite von 1m36 bei einer Reichweite von 68 cm. Er gewährleistet eine Nutzlast von 250 g und eine Bewegungspräzision auf den Millimeter genau.
Dieser programmierbare Roboterarm wird von Dynamixel U2D2 und CM9.04 gesteuert und garantiert eine große Flexibilität bei Verwendung und Design. Seine bewegliche Drehbasis und sein drehbares Handgelenk bilden die Grundlage für seine Wendigkeit. Darüber hinaus ermöglicht sein Greifer mit austauschbaren Fingern das Testen von Design und 3D-Druck. Zusätzlicher Schaumstoff und Gummi wurden in die Box geschoben.

Wenn dieser Roboterarm uns mit seiner hohen Bewegungspräzision so verblüfft, liegt es daran, dass er mit 9 Dynamixel-Servomotoren der Serien XM und XL ausgestattet ist. Diese von Robotis entwickelten Servos der neuesten Generation zeichnen sich durch ein hohes Drehmoment, ein solides und intelligentes Design und vor allem durch umfangreiche Programmiermöglichkeiten aus.
Die hohe Auflösung dieser Servomotoren ermöglicht diese Bewegungsflexibilität, die Sie bei der Verwendung Ihres mobilen Arms von Projekt zu Projekt schätzen werden.
Enthalten:
Finden Sie alle freien Ressourcen des 6-Achsen-Roboterarms WidowX 250:
Handbücher für Dynamixelservomotoren:

Nach dem Roboterarm WidowX 200 und dem 5-achsigen WidowX 250 ist Interbotix mit dem 6-achsigen Roboterarm WidowX 250 zurück. Für den Bau dieses mobilen Arms für Lehre und Forschung wurden 9 Dynamixel-Servomotoren der Serien XM und XL benötigt.
















