Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,02 € für die Ökosteuer
Der Servomotor Dynamixel XL430-W250-T mit TTL-Schnittstelle gehört der Kategorie der "Low Cost" Servomotoren an. Er bietet außerdem mehr Flexibilität bei der Montage und im Einsatz sowie ein kompaktes Design für alle kleinformatigen Kreationen.
Der Servomotor Dynamixel XL430-W250-T von Robotis richtet sich an bescheidenere Geldbörsen, bietet aber dennoch die schönen Vorzüge der Serie X von Dynamixel: Die Geschwindigkeitssteuerung und eine Positionssteuerung mit 360°-Spielraum über einen kontaktfreien magnetischen Encoder mit hoher Effizienz (verkürzte Ausführungszeit, um Energie zu sparen). So nutzt dieser kleine Servo eine Leistung von 40 mA statt 100 mA wie bei früheren Modellen. Er ist kompatibel mit allen Modellen der Serie X-430 (XM und XH), mit denen er die mechanische Struktur gemeinsam hat.
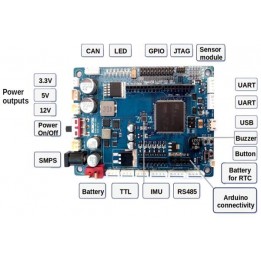
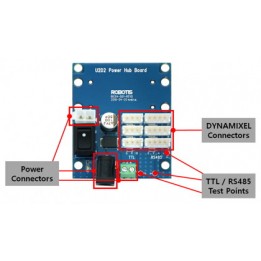
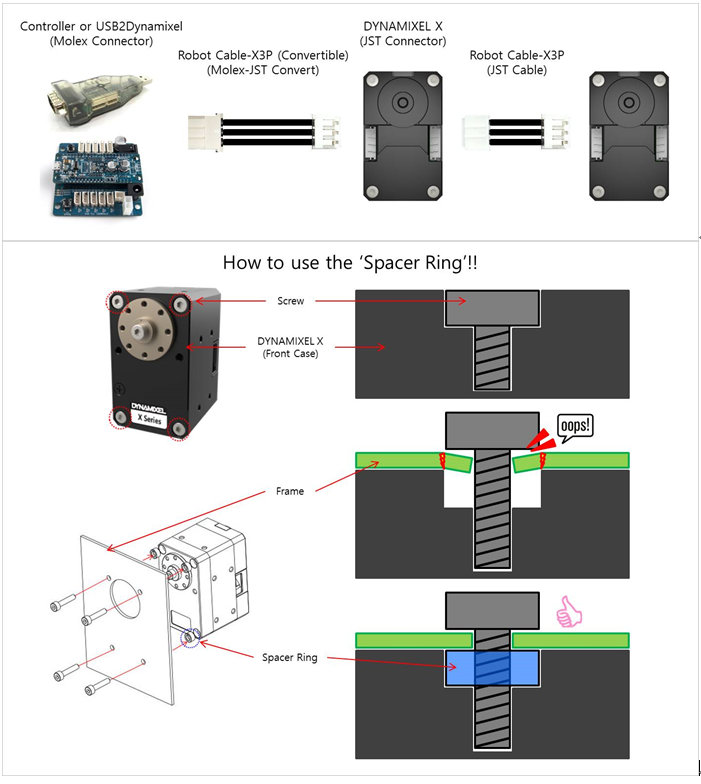
Wie immer kann der Servomotor Dynamixel mit dem USB2Dynamixel, der U2D2 Stecker oder einem geeigneten Mikrocontroller über den PC (Windows, Macintosh oder Linux) gesteuert werden (Sehen Sie unten die benötigten Komponenten):
Es stehen 6 Betriebsmodi zur Verfügung, die Profilsteuerung sowie die Verfolgung zahlreicher Daten wie Geschwindigkeit, Position, Spur usw.
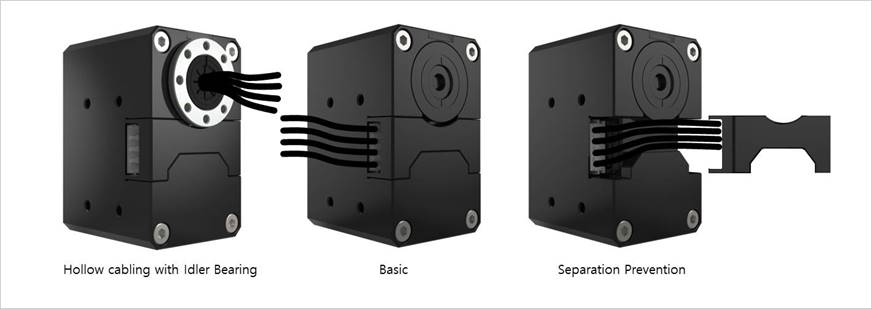
Die Rückseite dieses Robotis-Servos ist hohl und erlaubt dadurch verschiedene Verkabelungen, um ihn für Ihr Projekt bestmöglich zu positionieren. Die Verschraubung erfolgt dank des Abstandsrings risikofrei und mühelos direkt auf dem Gehäuse.
Das Aluminiumgehäuse sorgt auf effiziente Weise für thermische Sicherung.
Im Lieferumfang enthalten:
Über den folgenden Link finden Sie sämtliche Informationen zum Servomotor XL430-W250-T:
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Der Servomotor Dynamixel XL430-W250-T mit TTL-Schnittstelle gehört der Kategorie der "Low Cost" Servomotoren an. Er bietet außerdem mehr Flexibilität bei der Montage und im Einsatz sowie ein kompaktes Design für alle kleinformatigen Kreationen.