")
")
")
")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 2,50 € für die Ökosteuer
![]()
Das Projekt Poppy entstand am Flowers Labor des INRIA (Institut National de Recherche en Informatique et en Automatique) von Bordeaux unter der Leitung von Pierre-Yves Oudeyer.
Am Anfang des Projekts stand die Idee, eine offene Technologie zu entwickeln, die Forschern, Lehrkräften und Privatpersonen eine komplett als Open-Source konzipierte Hardware bietet, mit der die Kreationen jedes Einzelnen effizient geteilt werden können.
Rein wissenschaftlich betrachtet, erlaubt die Plattform Poppy wiederholbare Ergebnisse.
Deshalb ist das Projekt Poppy:
Die Technologieplattform Poppy besteht aus Open-Source-Hardwarevorlagen, einer Software-Library Pypot basierend auf der Programmiersprache Python sowie einer Website der Anwender-Community, wo jeder den Umgang mit der Plattform erlernen und seine Kreationen teilen kann: http://www.poppy-project.org
Das Ökosystem Poppy, das ursprünglich vom INRIA-Team Flowers entwickelt und unterstützt wurde, wurde 2018 an den Verein Poppy Station übertragen. Hier kommen Akteure aus Wirtschaft, Forschung, Ausbildung, Kultur und Bildung zusammen, die eine gemeinsame Vision haben: "Robotik ist eine Chance, wenn sie beherrscht und in den Dienst der Menschheit gestellt wird". Génération Robots, der Distributor von Poppy-Robotern, ist einer der Gründungspartner der Poppy Station.
Die Idee hinter dem Projekt Poppy ist, die Technologie mit der Wirklichkeit zu konfrontieren und einen Verbesserungskreislauf ausgehend vom Design zu schaffen, der anhand von Experimenten ein Feedback zur kontinuierlichen Optimierung der Technologie liefert.
Poppy ist eine Technologieplattform, mit der alle möglichen Kreaturen und Roboter gestaltet werden können. Derzeit bieten die Gründer des Projekts Poppy drei Modelle an, Sie können jedoch mithilfe dieser Plattform auch eigene Roboter entwickeln. Die angebotenen Modelle sind:
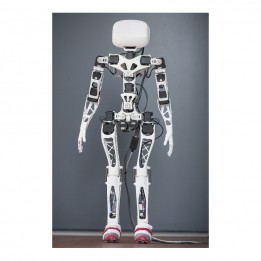
Es handelt sich um die Ikone der Roboterplattform Poppy, die als erstes Modell entwickelt wurde. Dieser 85 cm große, humanoide Roboter wird mithilfe von Teilen aus dem 3D-Drucker, Dynamixel Servomotoren sowie verschiedenen Elektronikteilen gebaut.
Da der Roboter eine Open-Source Hard- und Software aufweist, können Varianten dieses Modells konzipiert und ganz nach Bedarf weiterentwickelt werden, sei es in wissenschaftlicher, pädagogischer, künstlerischer o.ä. Hinsicht. Die beiden nachfolgenden Videos zeigen den Roboter Poppy.
Das Projekt Poppy soll jedermann in die Lage versetzen, die Entstehung der digitalen Welt, die uns umgibt, zu verstehen und selbst dazu beizutragen. Der Roboter Poppy ist daher ein Werkzeug erster Wahl für Lehrkräfte und Ausbilder.
Der Roboter Poppy wurde erfolgreich in höheren Schulen und Ingenieurschulen eingesetzt.
Im Gruppenunterricht konzentrieren sich die SchülerInnen auf präzise Ziele (Konstruktion eines neuen Mechanikteils, Bau eines Beins, Hinzufügen von Arduino-Sensoren, Programmierung spezifischer Verhaltensweisen usw.), teilen im Rahmen eines integrativen, kooperativen Ansatzes ihre Kenntnisse und bereichern sich dadurch gegenseitig.
Der Roboter Poppy eignet sich ganz besonders für Vereine zur Förderung der Wissenschaft, Makers und FabLabs. Jeder kann sich am Projekt beteiligen und seine Ideen und Kreationen teilen oder sogar auf dem Diskussionsforum Fragen stellen: https://forum.poppy-project.org .
Zeitraffer von der Montage des Poppy
Die Plattform Poppy bietet die Möglichkeit, Code und Roboterentwürfe zu teilen. Die Plattform Poppy wurde entwickelt, damit Forscher die Ergebnisse anderer Labors reproduzieren und teilen können.
Insbesondere erlaubt der Roboter Poppy aufgrund seiner modularen Bauweise das Testen mehrerer Entwürfe, wie dieser Artikel beschreibt.
Im nachstehenden Video erläutert Pierre-Yves Oudeyer, wie der Poppy wissenschaftliche Möglichkeiten aufzeigt, mit denen Lern- und Entwicklungsziele verfolgt werden können:
Strukturteile in 3D | Eine Software-Library für die Programmierung  Die Pypot Library zur Programmierung der mithilfe der Plattform Poppy hergestellten Roboter in Python. Die Roboter Poppy sind auch über eine grafische Programmierschnittstelle namens SNAP! programmierbar. | |
Für Simulatoren verfügbare Modelle  Ein Modell des Roboters Poppy ist für die Simulation mit V-Rep verfügbar. Der Transfer auf Gazebo läuft derzeit noch. | Aktive Anwender-Community  Die Anwendergemeinde wächst täglich, wie die Aktivität des Forums und die Anwendungen rund um die verschiedenen Poppy Roboter beweisen. |
Die Anwendergemeinde wächst täglich, wie die Aktivität des Forums und die Anwendungen rund um die verschiedenen Poppy Roboter beweisen.
Zusätzlich zu einer herkömmlichen Programmierung in Python kann die Plattform Poppy per WiFi mithilfe eines einfachen Webbrowsers über IPython programmiert werden.
Der Roboter Poppy Humanoid ist 85 cm groß und besonders leicht (3,5 kg). Dieser Roboter verfügt über 25 aktive Freiheitsgrade und vor allem - eine seine Besonderheiten - einen mehrfach artikulierten Körper mit 5 Freiheitsgraden.
Es hat eine Raspberry Pi 4 Modell B Karte im Kopf, mit der Sie Ihre Programme einbetten und in Wifi und Ethernet kommunizieren können. Eine im Kopf platzierte Kameramodul für Raspberry Pi V2 ermöglicht es, Programme mit künstlichem Sehen zu erstellen.
Der Roboter Poppy wird komplett als Bausatz ausgeliefert. Er muss zur Gänze selbst zusammengebaut werden. Dafür stehen Ihnen Online-Montagevideos zur Verfügung. Achtung, diese Videos basieren auf der Odroid-Version des Roboters und enthalten eine Odroid XU4-Karte anstelle der Raspberry Pi-Karte. Diese Version ist nicht mehr zum Verkauf verfügbar.
Lieferumfang des Bausatzes:
Schuhe sind nicht inbegriffen, die Wahl bleibt ganz Ihnen überlassen (Poppy besitzt Schuhgröße 23).
Die nachstehenden Ressourcen erleichtern Ihnen den Einstieg mit dem Bau und der Programmierung des humanoiden Roboters Poppy.
Bitte folgen Sie den Anweisungen auf der Herstellerseite.
Bitte folgen Sie den Instruktionen auf der Herstellerseite.
Der Roboter muss sich zunächst im selben Netzwerk befinden, wie der zugreifende Computer. Sollte der Roboter direkt mit dem PC verbunden sein, muss diese Netzwerkverbindung geteilt/überbrückt werden. Für weitere Informationen, folgen Sie die diesem Link.
Das Abbild finden Sie im Absatz Easy and recommended way: use the Poppy SD-card
Detailierte Informationen zu Poppy finden Sie unter folgendem Link.
Weitere Informationen finden Sie im Poppy Forum. Wenn Sie weiterhin Probleme haben, können Sie uns gerne kontaktieren.
")