Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,05 € für die Ökosteuer
Dynamixel Servomotoren sind integrierte Aktuatoren mit:
Dynamixel Servomotoren besitzen einen individuellen Identifikationscode und können über digitale Pakete kommunizieren.
Hauptmerkmale der Dynamixel-Baureihe:
Wie die untenstehende Abbildung zeigt, können die Dynamixel Servomotoren aufgrund des eingebauten Controllers in Serie geschaltet werden. Die Geschwindigkeit der Datenübertragung beträgt 1 MB/s.
In diesem Video sind die Eigenschaften und Anwendungsmöglichkeiten von Dynamixel Servomotoren zu sehen:
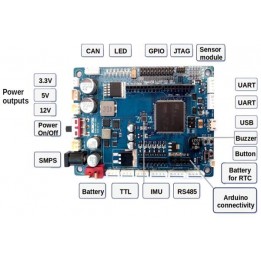
Die Servomotoren müssen an einen Controller (CM-900, CM-700, CM-5, CM-510 oder CM-530) angeschlossen werden. Die Programmierung erfolgt auf einfache Weise mithilfe von RoboPlus und erfordert keine besonderen Vorkenntnisse.
Die neuesten Controller unterstützen die integrierte C-Programmierung. Es ist ein SDK zur Entwicklung eigener Anwendungen vorhanden.
Die Servomotoren MX-106T und MX-106R sind die neuesten Modelle der Baureihe MX von Dynamixel. Sie ersetzen und verbessern den Servomotor EX-106+ durch einen kontaktfreien, absoluten Positionssensor mit einer Präzision von 12 Bit (4096 Positionen). Er erlaubt eine 360°-Positionssteuerung (gegenüber 251° beim früheren Modell), die Geschwindigkeitssteuerung bei kontinuierlicher Rotation sowie die Schätzung des Drehmoments auf der Basis der Stromstärke.
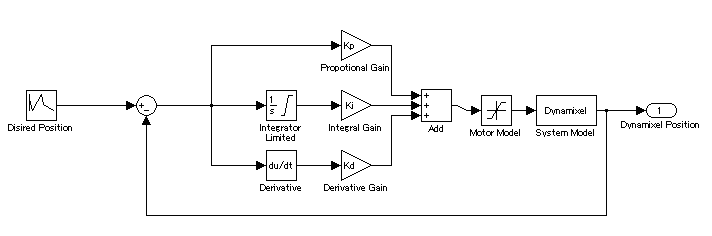
Außerdem verfügen sie über eine PID-Steuerung (Proportional-Integral-Derivat), die für jeden Motor einzeln parametriert werden kann. Die zulässigen Werte liegen zwischen 0 und 255, anschließend werden die PID-Koeffizienten nach den untenstehenden Formeln berechnet.
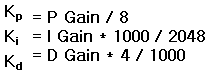
Zwei Servomotoren Dynamixel MX-106R können im 'Dual Mode' verwendet werden, wobei der Slave-Servo die Bewegungen des Master-Servos exakt reproduziert (oder das genaue Gegenteil der Bewegungen, wenn die Option 'Reverse' aktiviert wurde)
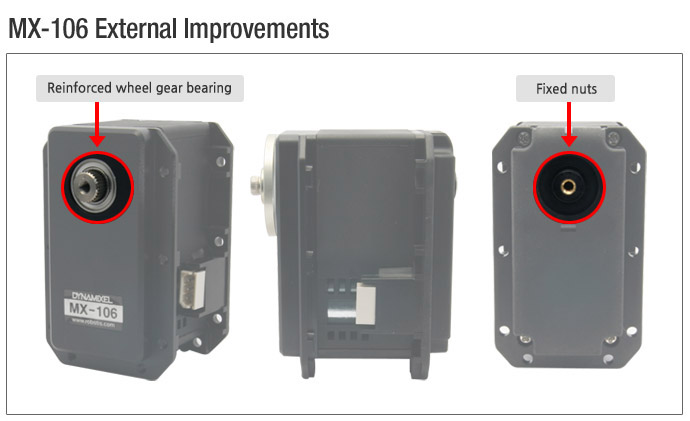
Das Gehäuse des Servomotors EX-106+ wurde ebenfalls leicht verändert, der Servomotor MX-106R ist daher nicht kompatibel mit dem HN05-N101/T101 Set.
Der Servomotor Dynamixel MX-106R unterstützt das Kommunikationsprotokoll RS485 (im Gegensatz zum Servomotor MX-106T, der die TTL-Kommunikation nutzt) mit hohem Durchsatz (3 Mbs). Daher ist er mit den Controllern CM-700 kompatibel. Achtung, die empfohlene Betriebsspannung ist nicht mehr dieselbe wie beim EX-106+.
Sämtliche technischen Merkmale des Servomotors Dynamixel MX-106R stehen auf der Herstellerwebsite unter folgender Webadresse zur Verfügung: https://emanual.robotis.com/docs/en/dxl/mx/mx-106/
Mithilfe dieses Dokuments können die Merkmale der verschiedenen Dynamixel Servomotoren im Handumdrehen verglichen werden.

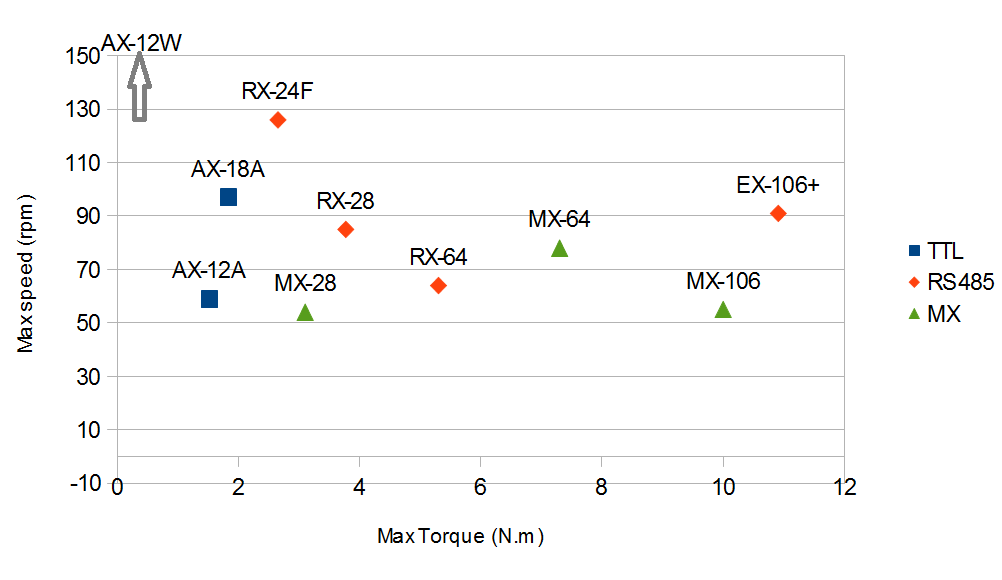
Vergleich der technischen Daten von Dynamixel Servomotoren
Die nachstehende Abbildung zeigt die technischen Merkmale der verschiedenen Dynamixel Servomotoren und ihre Positionierung aufgrund ihrer Leistungsdaten. Die Servomotoren werden nach der Art der Kommunikation unterschieden (die Serie MX bietet beide Kommunikationsarten an).
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.