Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,63 € d'éco-participation
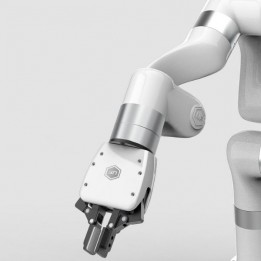
Le gripper Robotis RH-P12-RN-UR est un préhenseur industriel conçu pour s'adapter aux bras collaboratifs UR e-Series. Il combine force, légèreté, précision et adaptabilité pour de nombreuses applications robotiques et industrielles.
Le gripper Robotis RH-P12-RN-UR se compose d'une pince à un degré de liberté composée de deux doigts à articulation passive. Très légère avec ces 500 g, elle maintient une prise enveloppante jusqu'à 10 cm de diamètre, et sur des objets pouvant atteindre un poids de 5 kilos. Cette légèreté et cette force de préhension permettent de limiter les efforts imposés au bras collaboratif UR sur lequel elle s'adapte.
Robotis a conçu ici un préhenseur Universal Robots compatible avec tous les modèles de la série e : UR3e, UR5e, UR10e et UR16e. Sont ainsi inclus avec la pince tout le matériel de montage et les supports logiciels permettant une installation rapide du préhenseur sur son bras.
Pour offrir un plus grand éventail d'applications déployables avec ce préhenseur industriel, chaque doigt est facilement détachable et peut être remplacé par un doigt customisé. Le préhenseur peut ainsi s'adapter à de multiples environnements de travail, de l'assemblage à la manipulation en passant par le chargement et le déchargement.
Inclus :
Consultez toutes les ressources en ligne disponibles pour le préhenseur Robotis RH-P12-RN-UR :

Le gripper Robotis RH-P12-RN-UR est un préhenseur industriel conçu pour s'adapter aux bras collaboratifs UR e-Series. Il combine force, légèreté, précision et adaptabilité pour de nombreuses applications robotiques et industrielles.