Dieses Glossar der Robotik ist keineswegs erschöpfend, soll jedoch einige spezifische Begriffe klären, denen Sie im Zuge Ihrer Beschäftigung mit mobilen Robotern begegnen könnten.
Liste der Begriffe
Rückkopplung
Basic Stamp
BEAM
Sensoren
Differenzialantrieb
CMUCAM
Echoortung
Effektor
Sechsfüßler
Odometrie
Pathfinding (Wegfindung)
Perceptual Aliasing (Perzeptuelle Kongruenz)
Neuronale Netze
Roboter
Evolutionäre Robotik
Probabilistische Robotik
Subsumption
Telemetrie
Rückkopplung
In der Automatisierungstechnik bezeichnet man als Rückkopplung jenen Algorithmus, dessen Hauptzweck die Stabilisierung und Verbesserung der Systemreaktion auf seine ursprüngliche Anweisung ist. Dabei soll der Istzustand mit der ursprünglichen Anweisung verglichen und ggf. korrigiert werden. Wenn beispielsweise ein Roboter dafür programmiert werden soll, einer weißen Linie am Boden zu folgen, so wird hierfür ein Algorithmus erstellt, der die Abweichung gegenüber der verfolgten Linie prüft und eventuell Korrekturmaßnahmen einleitet, wenn diese Abweichung zu groß wird. Deshalb sind die Bewegungen eines für die Linienfolge programmierten Roboters wie Lego Mindstorms NXT abgehackt.
Neben dem Begriff der Rückkopplung spricht man auch von einem System, das durch Regelkreise mit negativer Rückkopplung gesteuert wird, bzw. von einem Regelsystem in geschlossener Schleife (Closed Loop).
Mehr über die Rückkopplung erfahren Sie hier:
Sensoren
Bei Sensoren handelt es sich um Roboterkomponenten, mit denen dieser in der Lage ist, sein Umfeld sowie seinen internen Zustand wahrzunehmen. Man spricht auch von Fühlern. Sensoren liefern entweder Informationen an einen intelligenten, zentralen Stein (es können auch mehrere Intelligent Bricks vorhanden sein) oder sie wirken im Rahmen eines Reflexbogens direkt auf Effektoren ein. Hier einige Arten von Sensoren, die man üblicherweise bei mobilen Robotern findet (Liste nicht erschöpfend):
| Sensortyp | Messtyp |
| Ultraschallsensoren | Entfernungsmessung (Telemetrie) |
| Infrarotsensoren | Entfernungsmessung (Telemetrie) |
| RFID-Sensoren | Positionsbestimmung gegenüber einem RFID-Empfänger (Transponder) |
| Lasersensoren | Entfernungsmessung (Telemetrie) |
| Lichtsensoren | Messung der Lichtstärke |
| Farbsensoren | Farberkennung |
| Geräuschsensoren | Messung der Geräuschstärke |
| Winkelmessungs-, Drehsensoren | Winkelmessung, Rotationsmessung auf einer Achse |
| Beschleunigungsmesser | Messung der Geschwindigkeitsschwankung (Beschleunigung) |
| Feuchtigkeitssensoren | Messung der externen Feuchtigkeit |
| Temperatursensoren | Temperaturmessung (intern oder extern) |
| Magnetsensoren | Messung der Stärke oder Richtung eines Magnetfelds (Einsatz meist zur Orientierung gegenüber dem Erdmagnetfeld). |
| GPS-Sensoren | Positionsbestimmung |
| Kamera (Webcam, CMUCAM) | Sicht |
CMUCAM
Unter CMUCAM versteht man eine kleine Onboard-Kamera, die speziell für mobile Roboter entwickelt wurde. Das System umfasst eine Kamera und einen Mikrocontroller für einfache Dienste wie die Bildauswertung und Verfolgung von Farbbereichen. Es handelt sich beim CMUCAM also um ein relativ einfaches optisches System.
Die ersten Spezifikationen für diesen Kameratyp wurden von der renommierten Carnegie Mellon University in den USA entwickelt, die im Bereich der Robotik führend ist. .
Folgende CMUCAM-Kameras werden von Génération Robots angeboten:
Mehr über die CMUCAM erfahren Sie hier:
Differenzialantrieb
(engl. Differential Drive)
Für zweirädrige oder raupenkettenbetriebene Roboter besteht das Prinzip darin, die Geschwindigkeit und Drehrichtung jedes der Räder oder der Raupenkette zu modulieren, um die Bewegungsrichtung und Rotation des Roboters zu bestimmen. Wenn beispielsweise beide Räder sich mit gleicher Geschwindigkeit in dieselbe Richtung drehen, so bewegt sich der Roboter geradeaus. Wenn man jedoch die Geschwindigkeit des rechten Rads erhöht, so dreht sich der Roboter nach links. Der Drehwinkel hängt dabei vom Geschwindigkeitsunterschied zwischen den beiden Rädern ab.
Echoortung
Echoortung lässt sich wie folgt definieren: „Methode zur Erkennung der Lage von Hindernissen oder Beutetieren, eingesetzt von verschiedenen Tieren, die in der Dunkelheit (Fledermäuse) oder im Wasser (Wale) leben. Dabei werden Ultraschallwellen oder hohe Töne ausgesandt und die Laufzeit der Schallwelle gemessen, bis das Echo aus verschiedenen Richtungen zurückgeworfen wird.“ Bei programmierbaren, mobilen Robotern wird dieses Prinzip von Ultraschallsensoren.
Effektor
Ein aktiver Mechanismus des Roboters. Oft handelt es sich um Motoren, die Bewegungen auslösen (Bewegung eines Roboterarms, Drehbewegung der Räder, Beinbewegung bei einem Sechsfüßler …). Es können jedoch auch Pneumatik- oder Hydraulikzylinder gemeint sein.
Sie werden auch als Aktuatoren oder Aktoren bezeichnet.
Bei im Zusammenhang mit mobilen Robotern verwendeten Motoren spricht man eher von Servomotoren. Ein Servomotor ist ein Motor, der in der Lage ist, eine bestimmte Position zu erreichen und zu halten. Es kann sich speziell um einen Winkel oder eine zurückzulegende Entfernung handeln. Bei der Programmierung eines Servomotors für Ihren mobilen Roboter ist eine Rotationsdauer, Drehgeschwindigkeit und/oder Drehzahl anzugeben.
Sechsfüßler
Ein sechsfüßiger Roboter besitzt, wie der Name schon sagt, sechs Beine (im Gegensatz zu zweibeinigen Robotern, Robotern mit Rädern oder Raupenketten). Parallax bietet ein Crawler-Set an, mit dem sich ein Boe-Bot in einen Sechsfüßler verwandeln lässt (der Boe-Bot ist ein Roboter auf Rädern).
Odometrie
(engl. Dead Reckoning)
Dabei handelt es sich um eine Methode zur Positionsbestimmung eines mobilen Roboters in Bewegung. Wörtlich ist Odometrie die Wissenschaft von der Positionsbestimmung und Bewegungssteuerung eines mobilen Systems. Die Messung basiert auf der individuellen Messung der Fortbewegungen der Roboterräder. Das Konzept ist relativ einfach: Wenn die Drehrichtung eines Rads, seine Drehgeschwindigkeit und Rotationsdauer bekannt ist und diese Messung an allen Rädern des Roboters erfolgt, kann die Position des Roboters gegenüber dem Ausgangspunkt eingeschätzt werden.
Die Odometrie funktioniert bei Robotern mit Rädern recht gut, bei Robotern mit Raupenketten ist sie aufgrund des mangelhaft definierten Kontakts der Raupenketten mit dem Boden verrauscht, bei Robotern mit Beinen jedoch sehr schlecht. Das Problem bei der Odometrie ist, dass die Fehler im Laufe der Zeit zunehmen. Oft ist es interessant, diese Messungen mit gelegentlichen Messungen an anderen Sensoren zu überschneiden (RFID, Infrarot …). Optische Encoder für Vex Robotics Roboter
Mehr über die Odometrie erfahren Sie hier:
Pathfinding (Wegfindung)
Die Wegfindung besteht darin, eine Möglichkeit zur Fortbewegung in einem Umfeld zwischen einem Ausgangs- und Zielpunkt zu finden, wobei verschiedene Einschränkungen zu berücksichtigen sind.
In der mobilen Robotik ist die Planung einer Fortbewegung überaus komplex. Denn diese Fortbewegung erfolgt in einer realen Umgebung. Zunächst verfügt der Roboter nur über einen Schätzwert zu seiner Position, da seine Sensoren nicht perfekt sind. Ebenso muss er sich mit Hilfe von Effektoren fortbewegen, deren Präzision nicht absolut ist. Zur Berücksichtigung dieser Unwägbarkeiten müssen mathematische Modelle aus der Wahrscheinlichkeitsrechnung herangezogen werden. Wenn sich außerdem in der Umgebung Menschen oder Tiere befinden, muss vorhergesehen werden, wie diese sich fortbewegen, um eine Kollision zu vermeiden.
Die Wegfindung für reale oder simulierte physische Systeme (Roboter, Fahrzeug, Festkörper …) ist ein Forschungsgebiet, das als Bewegungsplanung bezeichnet wird.
Mehr über Pathfinding erfahren Sie hier:
Perceptual Aliasing (Perzeptuelle Kongruenz)
Mit diesem Problem wird die Unfähigkeit des Sensors bezeichnet, jeden einzelnen Ort in seinem Umfeld genau zu erkennen. Dies ist auf inhärente Einschränkungen zurückzuführen. So kann der Roboter mit dem Ultraschallsensor zwar erkennen, dass er vor einer Mauer steht, jedoch meist nicht, wo genau er sich entlang dieser Mauer befindet. Handelt es sich um das Ende, die Mitte oder den Anfang der Mauer? Zwei Messungen an verschiedenen Stellen der Mauer ergeben das gleiche Ergebnis (außer wenn der Roboter am Ende angekommen ist und das Fehlen der Mauer oder die Präsenz einer Kante erkennt).
Neuronale Netze
Computerprogramm, das sich an der Funktionsweise biologischer Neuronen inspiriert. Neuronen sind in Schichten organisierte biologische Zellen, wobei jedes Neuron über seine multiplen Verbindungen mit Neuronen der nächstniedrigeren Schicht ein elektrisches Signal empfängt, das je nach Aktivierungsfunktion ein Ausgangssignal an die nächstliegende Schicht auslöst. Diese Funktionsweise wird in künstlichen neuroalen Netzen reproduziert, denn sie stellen widerstandsfähige, flexible Programme dar und können in Abhängigkeit von Lerndaten, die dem Netz bereitgestellt wurden, Aufgaben lernen. Man spricht hierbei von Induktion oder Lernen aus Erfahrung.
Mehr darüber erfahren Sie aus dem vollständigen Wikipedia-Artikel über neuronale Netze:
Roboter
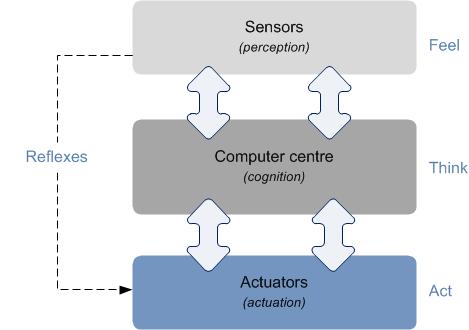
Es handelt sich um ein mechanisches System, das je nach einem ihm zugewiesenen Programm Aufgaben ausführt. Im Allgemeinen weisen Roboter eine Architektur auf, die sich wie folgt schematisch darstellen lässt:
Das Wort Roboter stammt aus dem Tschechischen und bedeutet „Arbeit“. Es wurde erstmals vom Schriftsteller Karel Capek in seinem Stück „R.U.R.“ (Rossum’s Universelle Roboter) verwendet.
Beim Wort Roboter handelt es sich um einen generischen Begriff, im Gegensatz zu Android, mit dem ein mechanischer Roboter mit menschlichem Erscheinungsbild gemeint ist, sowie Cyborg, einer halb menschlichen, halb künstlichen Kreatur.
Der Begriff Robotik wurde vom Schriftsteller Isaac Asimov geprägt, dem berühmten Autor der drei Gesetze der Robotik.
Bei den von Génération Robots angebotenen Robotern handelt es sich um programmierbare, mobile Roboter (autonom oder nicht autonom). Diese kleinen Roboter sind gute Lernmodelle für die Robotik.
Evolutionäre Robotik
(engl. Evolutionary Robotics)
Eine neue Disziplin in der Robotik, bei der Roboter als autonome Organismen angesehen werden, die ohne Intervention von außen oder explizite Programmierung menschliche Aufgaben lernen. Diese Sichtweise ist weitgehend an den Darwin’schen Selektionsprinzipien der bestgeeigneten Faktoren und Verhaltensweisen inspiriert.
Dabei geht es darum, Technologien wie die genetischen Algorithmen und Neuronennetze zu nutzen, damit Roboter von selbst „lernen“, was die beste Strategie zur Lösung eines Problems ist, durch Erlernen einer Reihe von Erfolgen und Fehlern..
Die aus dieser Theorie heraus entstandenen Roboter teilen mit lebenden Organismen bestimmte Merkmale wie Einfachheit, Robustheit, Modularität und Flexibilität (da sie sich an ihre Umgebung anpassen, sind sie gegenüber Veränderungen dieser Umgebung flexibel).
Mehr darüber erfahren Sie unter:
Probabilistische Robotik
Diese Methode basiert auf der Integration von Wahrscheinlichkeiten in Robotersteuerprogramme, um gewisse Unwägbarkeiten über das Umfeld besser zu handhaben und die Wahrnehmung, aber auch den Einsatz zu optimieren. Der Vorteil liegt bei dieser Methode darin, dass bei einem solcherart programmierten Roboter ungenaue Modelle und Sensoren nicht ins Gewicht fallen.
Subsumption

Hierbei handelt es sich um eine spezifische (die Hardware und Software betreffende) Roboterarchitektur aus der Feder von Rodney Brooks (Professor am MIT und früherer Leiter der Firma Irobot). Er prägte den Begriff im Jahre 1986 in seinem Artikel « Mobile Robots: Inspiration to Implementation ». Diese Architektur in Verbindung mit der verhaltensbasierten Robotik (Behavior Based Robotics) hatte einen starken Einfluss auf die Welt der mobilen Robotik.
Grundidee der Subsumption Architektur ist es, das Verhalten eines Roboters über Schichten zu kontrollieren, von den weniger abstrakten zu den abstraktesten. Die niederen Schichten (die weniger abstrakten) haben eine höhere Priorität. Man geht davon aus, dass höhere Schichten die darunter liegenden Schichten subsumieren. Jede Schicht ist mit Sensoren und Effektoren verbunden. So löst ein von den Sensoren wahrgenommenes Ereignis Reaktionen in jeder Schicht aus, die gegenläufig oder gleichläufig sein können.
Die niederen Schichten mit höherer Priorität agieren wie Reflexe bei Lebewesen, während die höhren Schichten wie Planungsaufgaben mit höherem Abstraktionsniveau reagieren.
Rodney Brooks hatte dabei den Hauptgedanken, dass die Kreation eines Gehirns zur Darstellung des äußeren Umfelds unnötig ist und dieser Typ von verhaltensbasierter Architektur zu scheinbar intelligenten Verhaltensweisen führen kann. Aus der Sicht von Rodney Brooks ist die Welt das beste Modell dafür.
Obwohl diese Theorie die Roboterbauer durchaus beeinflusst hat, weist sie auch einige Nachteile auf, darunter die Tatsache, dass es schwierig, ja unmöglich ist, Schichten zu vervielfachen. Denn es besteht die Gefahr, dass starke Interferenzen auftreten oder der entwickelte Roboter sehr unflexibel ist (es besteht keine Umsetzung einer Anpassung oder eines Lerneffekts in der schichtweisen Organisationsform).
Telemetrie
Technisches Verfahren, mit dem die Entfernung eines Gegenstands durch den Einsatz von optischen, akustischen oder radioelektrischen Elementen berechnet oder gemessen werden kann. Bei den verwendeten Instrumenten handelt es sich um Entfernungsmesser. Zur Entfernungsmessung können beispielsweise die von Génération Robots angebotenen Ultraschallsensoren herangezogen werden.
In der Robotik werden häufig Infrarot-, Ultraschall- oder Laser-Entfernungsmesser eingesetzt
Generation Robots (http://www.generationrobots.de)
Jegliche Vervielfältigung oder Nutzung bedarf der vorherigen ausdrücklichen Zustimmung.