Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
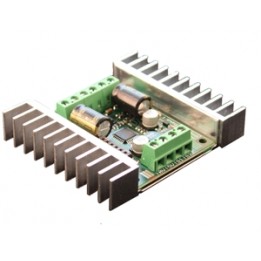
Mit dem Roboteq-Controller SBL 1360 A können Sie einen Motor mit einer Leistung von bis zu 30 A und 60 V steuern. Er ist mit einer Sonde mit Hall-Effekt ausgestattet oder funktioniert alternativ auch ohne Sonde dank der Trapezansteuerung.
Dieser Roboteq-Controller wurde entwickelt, um einen Motor mit Hall-Effekt-Sonde zu steuern. Mit den von der Sonde an ihn übertragenen Informationen sorgt er für eine sanfte, kontinuierliche Motordrehung. Er kann jedoch auch einen Motor ohne Sonde steuern. In diesem Fall kommt die Trapezfunktion ohne Sonde zum Einsatz.
Die Kommunikation über den CAN-Bus erlaubt die Montage von bis zu 127 Controllern auf demselben Netzwerk über ein einziges Twisted-Pair-Kabel. Das setzt voraus, eine große Zahl an CC-Motoren unter Vermeidung komplexer Verkabelungen steuern zu können.
Konfigurieren und personalisieren Sie Ihren Controller für bürstenlose Motoren mithilfe der Programmiersprache MicroBasic. Um Ihnen beim Generieren der Codezeilen und dem intuitiven Kompilieren zu helfen, entwickelte Roboteq ein PC-Hilfsprogramm: RoboRun+. Dieses erleichtert Ihnen die Programmierarbeit mit Menüs, Tasten und Schiebern. Die RoboRun+ Lizenz ist kostenlos zum Download verfügbar, Sie können aber auch die kostenpflichtige Version RoboRun+ Pro wählen, die ein größeres Volumen an Quellcodes unterstützt.
Holen Sie sich die nötige Dokumentation über den Controller für bürstenlose Motoren SBL 1360 A. Nachstehend haben wir eine Reihe von Ressourcen für Sie zusammengestellt:

Mit dem Roboteq-Controller SBL 1360 A können Sie einen Motor mit einer Leistung von bis zu 30 A und 60 V steuern. Er ist mit einer Sonde mit Hall-Effekt ausgestattet oder funktioniert alternativ auch ohne Sonde dank der Trapezansteuerung.