Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
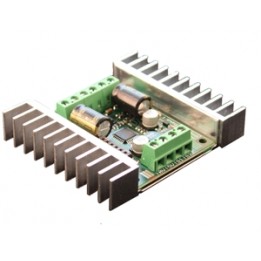
Der Roboteq-Controller SBL 2360 unterstützt zwei bürstenfreie CC-Motoren mit oder ohne Sonden durch Sinus- oder Trapezansteuerung.
Der Controller für bürstenlose Motoren SBL 2360 von Roboteq kann zwei Motoren mit bis zu 2 x 30 A Leistung und einer Spannung von 60 V verwalten. Die feldorientierte Regelung (FOC) bietet die Möglichkeit, zwischen der Sinus- und der Trapezansteuerung zu wechseln. Im letzteren Fall kann der Controller selbst solche Motoren steuern, die nicht mit Sonden ausgerüstet sind.
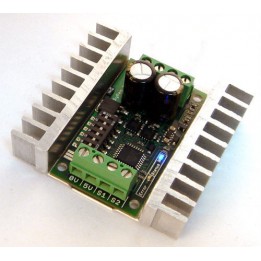
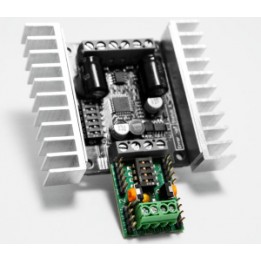
Der Controller SBL 2360 passt sich an viele verschiedene Sensoren an und liefert jedem Motor eine flexible, gleichmäßige Rotation. Er unterstützt viele Steuersignale, vom analogen Joystick bis zum Mikrocomputer. Mit dem CAN-Bus besteht die Möglichkeit, bis zu 127 Controller über ein Twisted-Pair-Kabel im Netzwerk anzuschließen.
Dieser zweikanalige Motorcontroller kann Motoren eines mobilen Roboters oder autonomen Systems unabhängig oder in Kombination steuern. So wird es möglich, das Gerät über einen Joystick, ein Fernsteuerungssignal usw. zu steuern.
Viele Systeme sind mit diesem Controller kompatibel: Land- oder Wasserfahrzeuge, Militär- oder Polizeifahrzeuge, autonome industrielle Maschinen, Präsenzmelder usw.
Werfen Sie einen Blick in die Unterlagen, die wir hier für Sie zusammengestellt haben, und starten Sie Ihre Experimente mit dem Controller für bürstenlose Motoren 2 x 30A 60V SBL 2360:

Der Roboteq-Controller SBL 2360 unterstützt zwei bürstenfreie CC-Motoren mit oder ohne Sonden durch Sinus- oder Trapezansteuerung.