



Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Der Dynamixel XC430-T150BB-T Servomotor ist ein robustes robotisches Gerät, das eine Vielzahl von Betriebsmodi, eine einfache Montagestruktur und eine Energieeinsparung durch Stromreduzierung bietet.
ROBOTIS erweitert seine Palette an XC430 Servomotoren mit dem XC430-T150BB-T. Dieser ist mit unaufdringlichen magnetischen Encodern ausgestattet, die volle 360°-Drehungen mit einer maximalen Geschwindigkeit von 106 Umdrehungen pro Minute ermöglichen. Er bietet ein beachtliches Drehmoment von 1,6 N.m bei einer Spannung von 12V, während er ein minimalistisches Gewicht von 65 g beibehält. Diese Mischung aus Leistung und Leichtigkeit macht ihn zu einem universell einsetzbaren und sehr leistungsfähigen Servomotor.


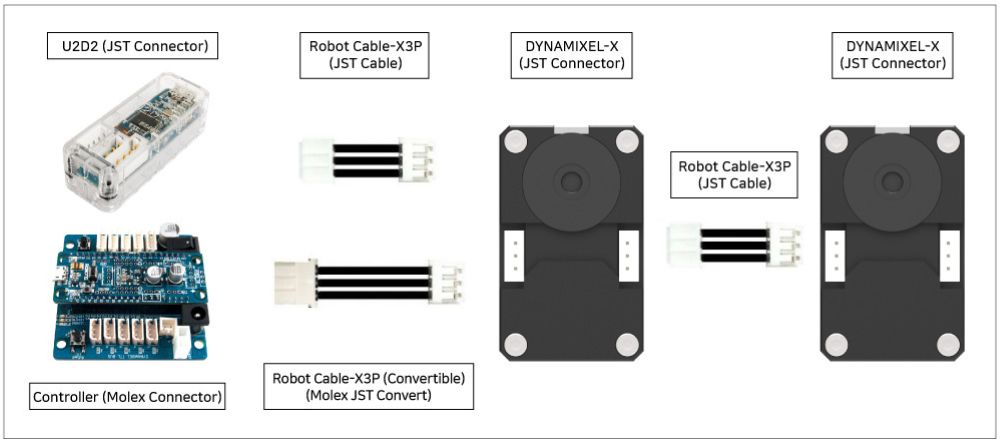
Was ist in der Box:
Finden Sie die richtigen Informationen zum Dynamixel XC430-T150BB-T Servomotor mit dieser speziell für Sie zusammengestellten Liste von Links:
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
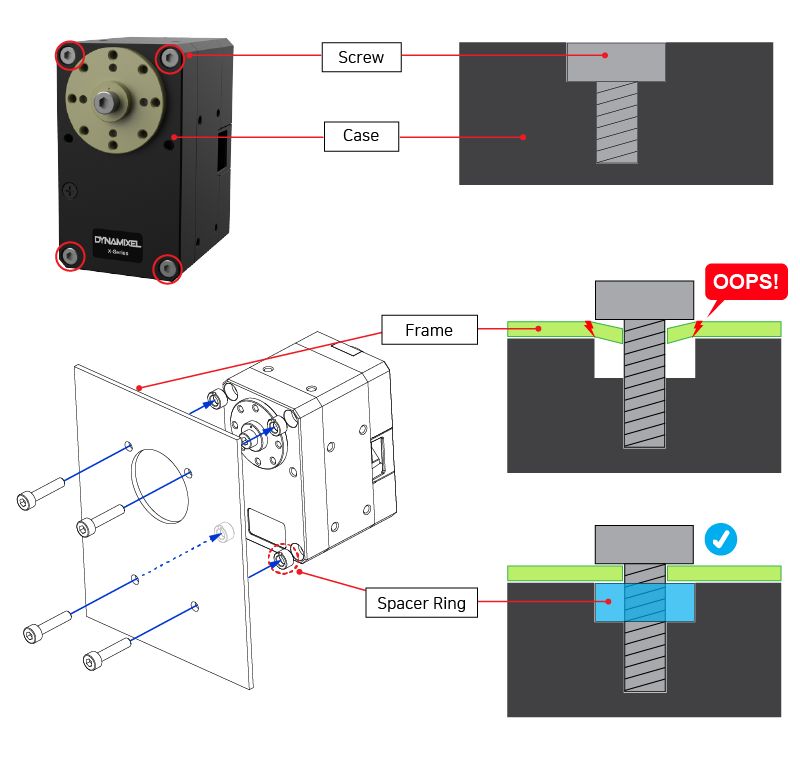
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Der Dynamixel XC430-T150BB-T Servomotor ist ein robustes robotisches Gerät, das eine Vielzahl von Betriebsmodi, eine einfache Montagestruktur und eine Energieeinsparung durch Stromreduzierung bietet.












{kind=link}