")
")
")
")
")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Entdecken Sie LIMO, einen mobilen Roboter, der auf einer agilen mobilen Plattform basiert. Diese evolutionäre Roboterstruktur ist auf die Entwicklung von künstlicher Intelligenz ausgerichtet. LIMO ist in 3 Versionen erhältlich: LIMO, LIMO PRO und LIMO ROS2
Der LIMO Mobile Robot ist mit ROS (1 und 2) und dem Gazebo-Simulator kompatibel. Dies ermöglicht den Zugriff auf eine Vielzahl von Open-Source-Demos und Beispielen für die Entwicklung Ihrer künstlichen Intelligenz.
Der LIMO ermöglicht es Ihnen, verschiedene Möglichkeiten in Bezug auf die autonome Navigation zu erkunden:
Mit seiner eingebauten Kamera und LiDAR sowie einer robusten Inertialeinheit erkundet, erkennt, überwacht und analysiert Ihr LIMO-Mobile-Roboter seine Umgebung wie ein echter Wachposten. Ideal für Sicherheits- und Überwachungsanwendungen und zur Erstellung eines autonomen UGV, der alle durchfahrenen Orte kartieren kann.
Die LIMO-Roboterplattform ist in 3 Versionen erhältlich: eine Standardversion, eine Pro-Version und eine ROS2-Version.
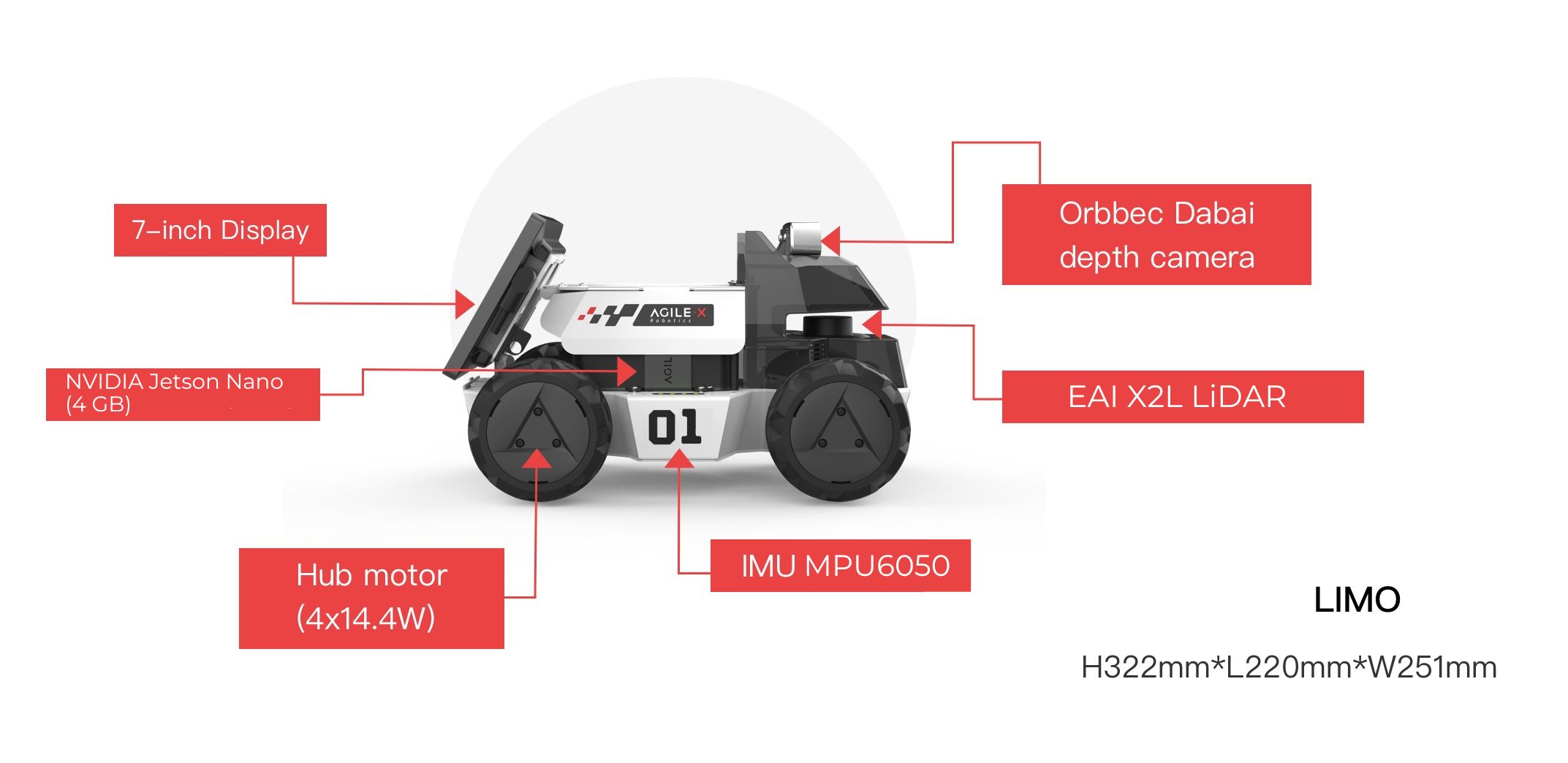
Die Grundversion des LIMO Mobile Robot umfasst einen Nvidia Jetson Nano, einen EAI X2L LiDAR und eine Orbbec DaBai Tiefenkamera.
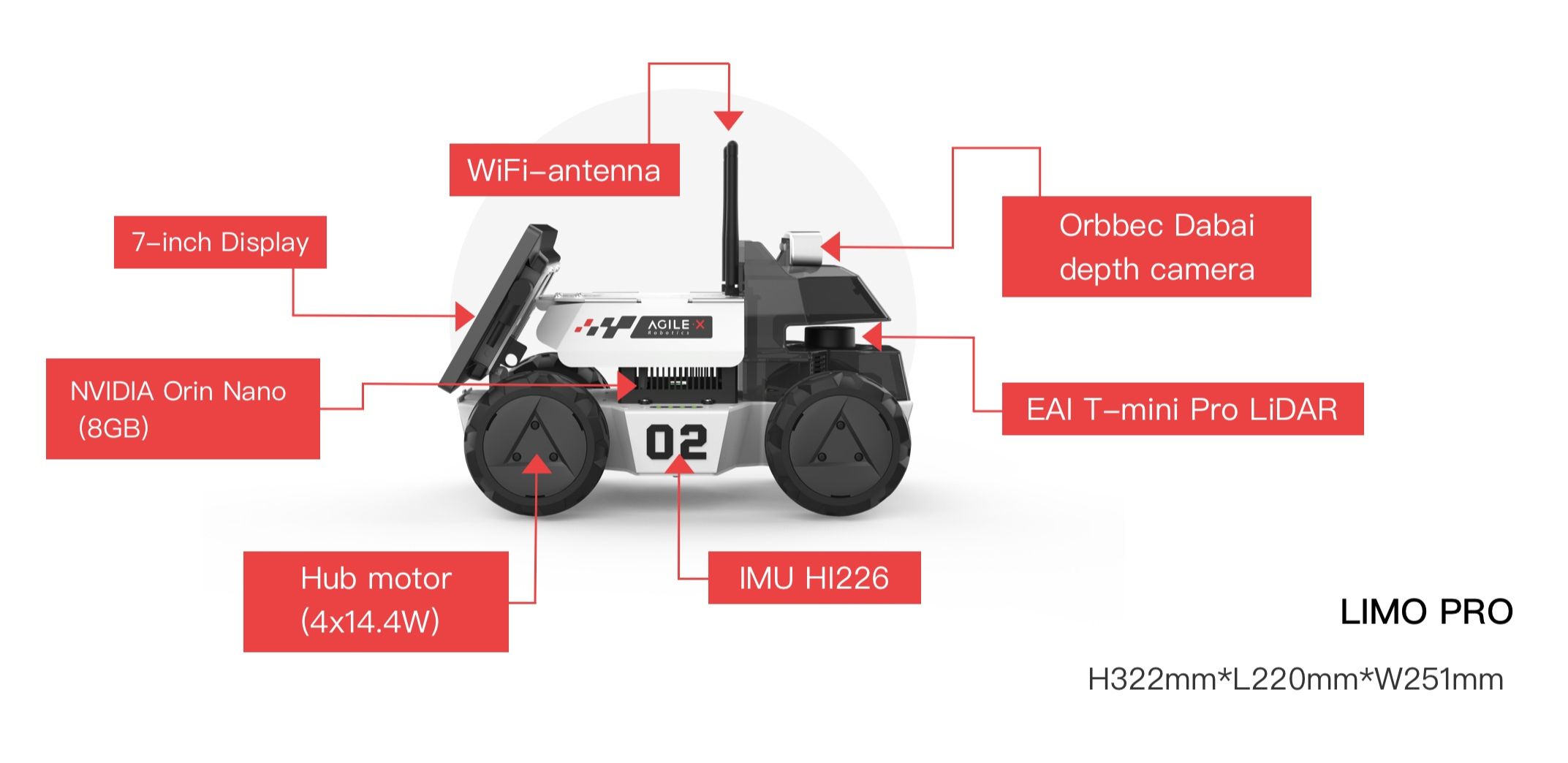
Der LIMO PRO Mobile Robot integriert den NVIDIA Orin Nano, einen EAI T-mini Pro LiDAR und die Orbbec Dabai Tiefenkamera. Diese verschiedenen Sensoren ermöglichen dem Roboter eine robuste Wahrnehmung seiner Umgebung. Er ist ideal für die Entwicklung von Anwendungen zur autonomen Navigation, Hindernisvermeidung und visuellen Erkennung.
Der LIMO PRO ist eine ideale Roboterplattform für Studierende und Forscher. Seine zahlreichen Sensoren und die fortschrittliche Software erleichtern das immersive Lernen.
Der LIMO PRO ist mit ROS 1 Noetic und ROS 2 Foxy kompatibel, um eine flexible Softwareintegration zu ermöglichen. Sein Akku bietet eine Betriebsdauer von bis zu 2,5 Stunden.
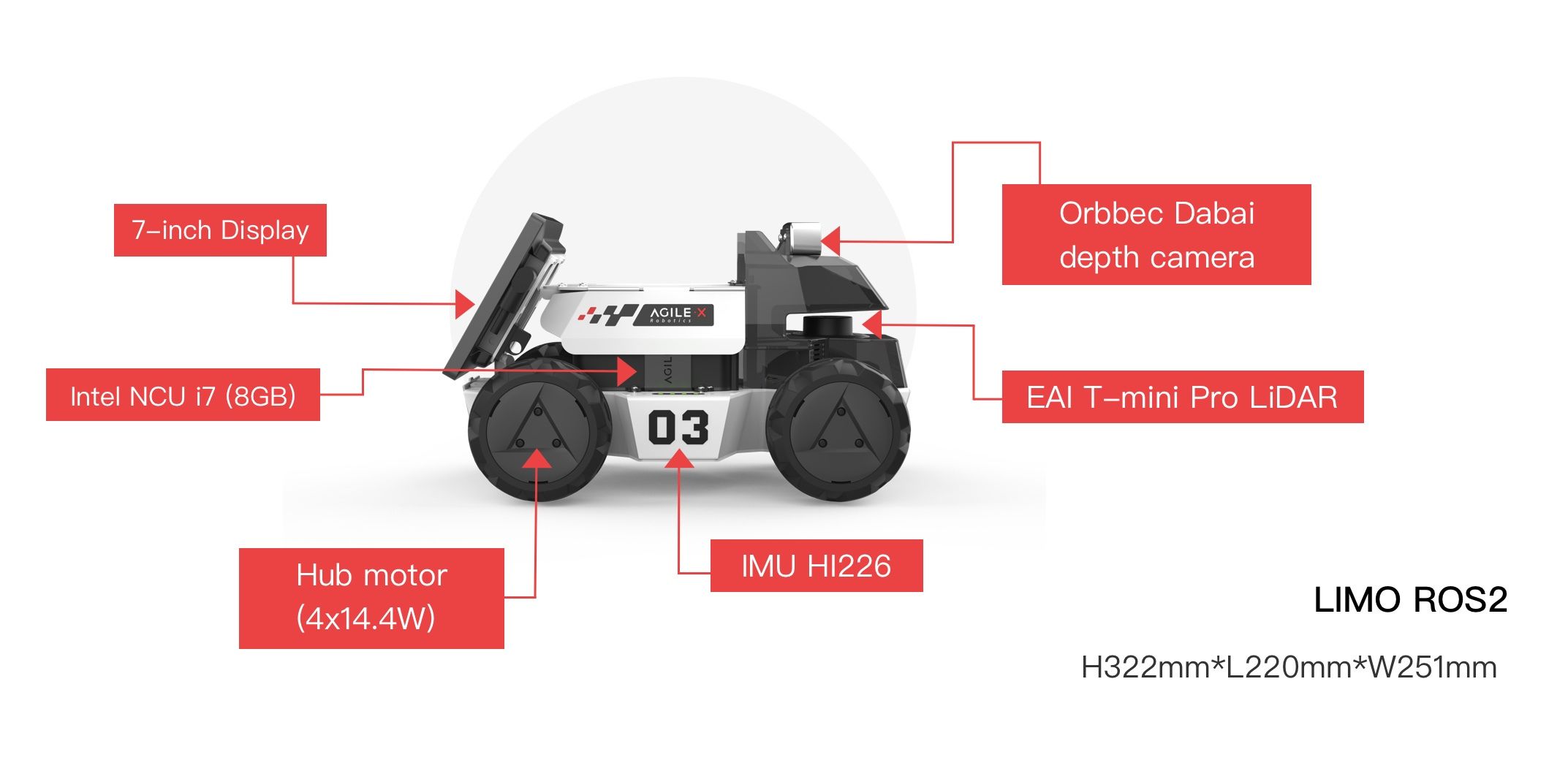
Der LIMO ROS 2 Mobile Robot ist mit einem Intel NCU i7 Prozessor ausgestattet, der es ihm ermöglicht, ROS 2 unter Ubuntu 22.04 auszuführen. Diese Version ist ideal für Forschung und Bildung im Bereich autonome mobile Roboter.
Der LIMO ROS 2 ermöglicht die Erkundung der neuesten Möglichkeiten von ROS 2, einschließlich wichtiger Open-Source-Frameworks wie Navigation2 für die Navigation von mobilen Robotern und MoveIt2 für die fortschrittliche Bewegungsplanung von Roboterarmen.
Der LIMO ROS 2 verfügt über eine lange Akkulaufzeit von 2,5 Stunden. Es ist nur mit ROS 2 verfügbar (nicht mit ROS 1).
| LIMO | LIMO PRO | LIMO ROS2 | |
| Abmessungen | 322*220*251mm | 322*220*251mm | 322*220*251mm |
| Gewicht | 4,8kg | 4,8kg | 4,8kg |
| Nutzlast | 4kg | 4kg | 4kg |
| Bodenfreiheit | 24mm | 24mm | 24mm |
| Lenksystem | 40 N·m | 40 N·m | 40 N·m |
| Bildschirm | 7 Zoll | 7 Zoll | 7 Zoll |
| Computer | Jeston Nano | Orin Nano | Intel NUC i7 |
| Tiefenkamera | Orbbec DaBai | Orbbec DaBai | Orbbec DaBai |
| LiDAR | EAI X2L | EAI T-mini Pro | EAI T-mini Pro |
| Batterie | 5.2Ah 12V | 10Ah 12V | 10Ah 12V |
| Laufzeit | 1 Stunde | 2,5 Stunden | 2,5 Stunden |
| Standby-Laufzeit | 2 Stunden | 4 Stunden | 4 Stunden |
| Betriebssystem | Ubuntu 18.04 | Ubuntu 20.04 | Ubuntu 22.04 |
| ROS-Version | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy | ROS2 Humble |
| Steuerungsmethode | Mobile App/Steuerung | Mobile App/Steuerung | Mobile App/Steuerung |
| Anwendungssteuerungsbereich | 10m | 10m | 10m |
| LIMO | LIMO PRO | LIMO ROS2 | |
| Abmessungen | 322*220*251mm | 322*220*251mm | 322*220*251mm |
| Gewicht | 4,8kg | 4,8kg | 4,8kg |
| Nutzlast | 4kg | 4kg | 4kg |
| Bodenfreiheit | 24mm | 24mm | 24mm |
| Radstand | 200 mm | 200 mm | 200 mm |
| Spurbreite | 175 mm | 175 mm | 175 mm |
| Motortyp | Nabenmotor (4x14,4W) | Nabenmotor (4x14,4W) | Nabenmotor (4x14,4W) |
| Maximale Geschwindigkeit | 1 m/s | 1 m/s | 1 m/s |
| Minimale Ackermann-Wendung | 0,4 m | 0,4 m | 0,4 m |
| Betriebstemperatur | -10°C ~ +40°C | -10°C ~ +40°C | -10°C ~ +40°C |
| Hindernishöhe | 40° | 40° | 40° |
| Stromversorgungsschnittstelle | DC (5.5x2.1mm) | DC (5.5x2.1mm) | DC (5.5x2.1mm) |
| Betriebssystem | Ubuntu 18.04 | Ubuntu 20.04 | Ubuntu 22.04 |
| IMU | MPU6050 | HI22 | HI22 |
| CPU | 6-Kern Arm Cortex-A78AE | i7-1135G7@2,40GHz x 8 | |
| GPU | 1024-Kern CUDA | Xe Graphics | |
| Batterie | 5,2Ah 12V | 10Ah 12V | 10Ah 12V |
| Laufzeit | 1 Stunde | 2,5 Stunden | 2,5 Stunden |
| Standby-Laufzeit | 2 Stunden | 4 Stunden | 4 Stunden |
| Kommunikationsschnittstelle | WLAN, Bluetooth | WLAN, Bluetooth | WLAN, Bluetooth |
| LiDAR | EAI X2L | EAI T-mini Pro | EAI T-mini Pro |
| Tiefenkamera | Orbbec DaBai | Orbbec DaBai | Orbbec DaBai |
| Computer | Jeston Nano 4G | Jetson Orin Nano 8G | Intel NUC i7 8G |
| USB-Anschlüsse | TYPE-C x1,USB2.0 x2 | TYPE-C x1,USB2.0 x2 | TYPE-C x1,USB2.0 x2 |
| Bildschirm | 7 Zoll | 7 Zoll | 7 Zoll |
| ROS-Version | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy | ROS2 Humble |
| Steuerungsmethode | Mobile App/Steuerung | Mobile App/Steuerung | Mobile App/Steuerung |
| Steuerungsbereich der Anwendung | 10m | 10m | 10m |
")
Entdecken Sie LIMO, einen mobilen Roboter, der auf einer agilen mobilen Plattform basiert. Diese evolutionäre Roboterstruktur ist auf die Entwicklung von künstlicher Intelligenz ausgerichtet. LIMO ist in 3 Versionen erhältlich: LIMO, LIMO PRO und LIMO ROS2