Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
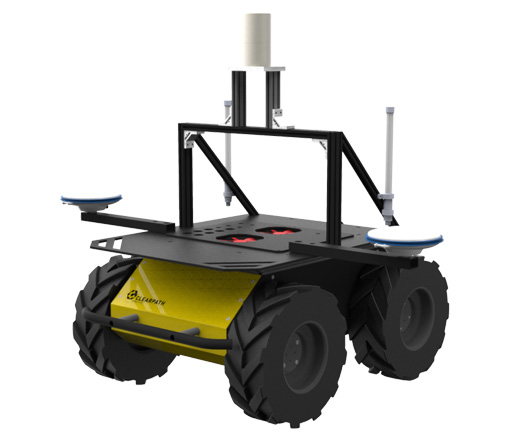
Die mobile Roboterplattform Husky A200 wurde als leistungsfähiges Arbeitsgerät selbst bei schwierigsten Einsatzbedingungen konzipiert. Ausgerüstet mit einem wartungsfreien Fahrgestell mit Allradantrieb, robusten Geländereifen und einer Bodenfreiheit, die zu den marktweit besten zählt, ist die mobile Plattform Husky A200™ gut aufgestellt, um in der Robotererkundung neue Horizonte zu erschließen.
Der Einsatz des Roboters Husky A200 für die Programmierung autonomer, vernetzter Systeme wird durch das Open-Source-System ROS bzw. LabVIEW Robotics von National Instruments vereinfacht.
![]()
Husky A200™ war die erste mobile Plattform für die Robotererkundung im Außeneinsatz, die ROS nativ unterstützt. Es stehen reichhaltige Demos und Tutorials zur Verfügung, die Ihnen den Einstieg erleichtern. Fachleute mit gemeinsamen Interessen teilen ihr Know-how im Rahmen der ROS-Anwendergemeinde.
Nutzen Sie auch die frei zugängliche, umfangreiche Code-Library für Ihre ersten Schritte und vergleichen Sie Ihre Entwicklungen mit anderen Anwendern der großen User Community des mobilen Roboters Husky A200™.
Der Husky A200™ verwendet serienmäßig ein Open-Source-Protokoll. Sie erhalten Zugriff auf alle Rohvariablen und verlieren keine Zeit mit der Suche nach Daten, die von einem exklusiven, proprietären System geschützt sind. Der Hersteller Clearpath Robotics stellt die API-Unterstützung für ROS sowie Optionen für C++ und Python auf der mobilen Plattform Husky bereit.
Es gibt nichts Ärgerliches als einen Hardwarewechsel, wenn sich bei der Forschungsarbeit Änderungen ergeben. Die von Ihnen vorgenommenen Anpassungen Ihres Roboters Husky erfolgen im Handumdrehen mithilfe der modularen Nutzlastgeräte, eines erleichterten Zugangs zur 5/12/24V Stromversorgung sowie umkonfigurierbaren Ein- und Ausgängen. Noch nie war das Prototyping einer mobilen Plattform so einfach und zeitsparend.
Die mobile Plattform Husky A200 wurde mit einer erweiterungsfähigen Architektur konzipiert. Dadurch ist sie die ideale Plattform zum Testen und Entwickeln von Systemen an mehreren Robotern gleichzeitig.
Eine bessere Einschätzung des Zustands Ihres Roboters Husky - das ermöglichen anpassungsfähige Steuerparameter des Fahrzeugs, hochpräzise Odometriemessungen und ein Diagnosesystem.
Die mobile Plattform Husky A200 lässt sich problemlos mit zahlreichen industriellen Bewegungselementen und Greifern kombinieren, um Fernbedienungs- oder Beförderungsaufgaben zu ermöglichen.
Die mobile Roboterplattform Husky A200 wird einsatzfertig für alle Fernbedienungsaufgaben ausgeliefert. Einfach Ihren Joystick anschließen und sofort loslegen.
Das nachstehende Video zeigt eine Reihe von Navigationsstrategien, die an einem mobilen Roboter Husky A200 mithilfe des ROS (Robot Operating System) getestet wurden:

Nachstehend finden Sie Unterlagen zur mobilen Außenplattform Husky A200.
Dieses Husky-Paket beinhaltet grundlegende Komponenten. Es wird mit einem Mini-ITX mit Linux und ROS vorinstalliert geliefert, während die obere Platte eine einfache Montage von Sensoren, Manipulations- oder Computerhardware ermöglicht. Schließen Sie einfach Sensoren an den Onboard-Computer und Husky-geregelte Stromversorgungen an, um loszulegen./span>

Ausgestattet mit einem kompletten Satz von Sensoren (LiDAR, GPS und Kamera), ermöglicht das Husky Explorer-Kit grundlegende autonome Funktionalität sowohl drinnen als auch draußen. Ein leistungsstarkes Mini-ITX-Computersystem ist mit Linux und ROS vorinstalliert. Alle ROS-Treiber sind installiert und vorkonfiguriert. Das Husky Explorer-Kit beschleunigt die Entwicklung, indem es die Notwendigkeit beseitigt, ein System zu entwerfen, herzustellen und zu integrieren, was Zeit und Geld spart.

Dieses Premium-Paket eignet sich ideal für die groß angelegte 3D-Kartierung und Navigation. Dieser Husky ist mit einem Novatel Inertial-GNSS-Navigationssystem ausgestattet, das eng mit einem Faseroptik-Gyroskop gekoppelt ist und eine präzise Positionierung selbst bei intermittierenden GPS-Signalen ermöglicht. Doppelantennen ermöglichen eine genaue Bestimmung des realen Kurses basierend auf GPS, während ein 3D-LIDAR 32 Velodyne eine detaillierte Wahrnehmung der Umgebung des Roboters bietet. Die Aufrüstung auf Lithium-Batterien ermöglicht eine längere Autonomie.