Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
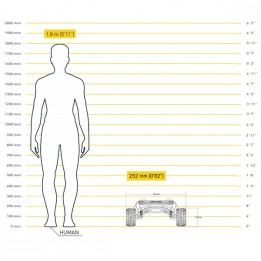
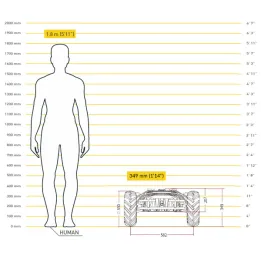
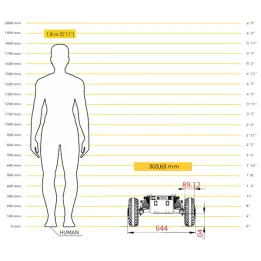
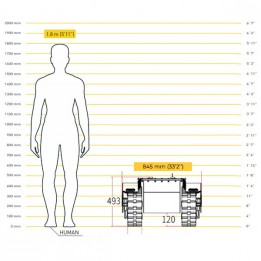
Das Agilex Autopilot Kit bietet ein umfassendes System, das die autonome GPS-Navigation eines leistungsfähigen Roboterchassis gewährleistet. Programmierbar auf Linux, ist diese Plattform zu 100 % mit ROS kompatibel, um die Entwicklung eines breiten Spektrums an Anwendungen zu ermöglichen.
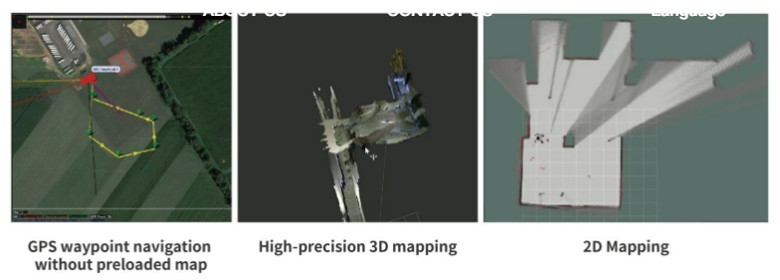


Das Agilex Autopilot Kit bietet ein umfassendes System, das die autonome GPS-Navigation eines leistungsfähigen Roboterchassis gewährleistet. Programmierbar auf Linux, ist diese Plattform zu 100 % mit ROS kompatibel, um die Entwicklung eines breiten Spektrums an Anwendungen zu ermöglichen.