Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Diese kompakte, leichte und energieeffiziente Version des Dynamixel Servomotors der professionellen Reihe bietet ein komplettes Steuerungsspektrum mit hoher Auflösung.
Mit dem Modell XL330-M077-T (und seinem Pendant XL330-M288-T) hat Robotis sein Modell des 100% programmierbaren Allround-Servomotors an eine wesentlich leichtere Palette angepasst - sowohl im Hinblick auf den Preis, als auch auf den Energieverbrauch und das Gewicht.
Der Dynamixel XL330-M077-T Servomotor ist eine äußerst kompakte Version der berühmten XH bzw. XM Reihen. Er eignet sich perfekt für kleine Anwendungen oder wenn der zur Verfügung stehende Platz stark eingeschränkt ist.
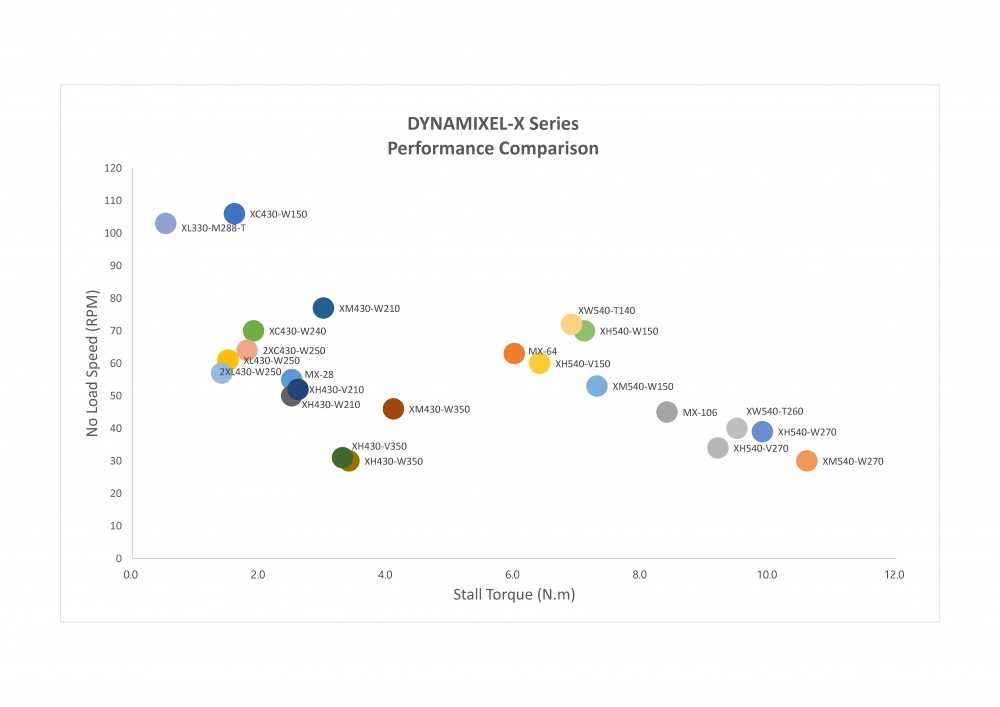
Darüber hinaus eignet er sich für kleine funkgesteuerte Rennautos, unterstützt er doch das PC-Fernsteuerungsprotokoll. Mit seiner äußerst hohen Leerlaufdrehzahl (bis zu 363 Umdrehungen pro Minute) und seiner hohen Auflösung ermöglicht er exaktes Steuern bei hoher Geschwindigkeit, zumal zu seinen verschiedenen Betriebsmodi auch PWM-Steuerung gehört.
Lieferumfang:
Technische Merkmale:
Aus den zahlreichen frei zugänglichen Online-Materialien unten erfahren Sie alles zu Ihrem Dynamixel XL330-M077-T Servomotor.
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Diese kompakte, leichte und energieeffiziente Version des Dynamixel Servomotors der professionellen Reihe bietet ein komplettes Steuerungsspektrum mit hoher Auflösung.