 UGV")
 UGV")
 UGV")
 UGV")
 UGV")
 UGV")
 UGV")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Der mobile Roboter Shadow Runner RR100 ist eine ROS-kompatible, mobile Outdoor-Plattform für Forschung und Hochschullehre. Der in Bordeaux von den Generation Robots-Ingenieuren entwickelte und hergestellte Shadow Runner ist ein wetterfester Geländeroboter. Seine größten Vorteile sind leistungsfähige Sensoren und die ROS-Kompatibilität.
Der RR100 ist die Version für Forschung und Lehre des Roboters GR100, der professionellen, ebenfalls von unseren Ingenieuren entwickelten Version mit vorinstallierter Software-Suite für die Lokalisierung und Navigation.
Anhand ihrer über 10-jähriger Erfahrung in der fortschrittlichen Robotik, angewandt auf verschiedene Sektoren (Landwirtschaft, Luft- und Raumfahrt, Kernkraft, Sicherheit usw.), entwickelten und produzierten die Ingenieure von Generation Robots ihren ersten mobilen Roboter für Forschung und Lehre.
Der Shadow Runner RR100 ist eine mobile Outdoor-Roboterplattform mittlerer Größe, ausgestattet mit Traktorrädern und einer Ackermann-Doppelachslenkung , der vielerlei Geländearten bewältigt .
Wir haben den Roboter RR100 mit leistungsfähigen Sensoren ausgerüstet, die einen schnellen Einsatz oder eine umgehende Customisierung des Roboters bei einer Vielzahl von Projekten ermöglichen. Der Roboter wird ohne eingebaute Navigation ausgeliefert – Sie können die ROS-Librarys also selbst wählen und installieren. Wir liefern einen Roboter, bei dem Sensoren und PC bereits integriert wurden . Linux und ROS sind auf dem PC ebenso vorinstalliert wie die Motorsteuerungen. Darüber hinaus ist der Roboter noch völlig offen, Sie können also Ihre eigenen ROS-Librarys installieren , und sämtliche Sensoren und Aktoren sind zugänglich.
Wir haben diesen Roboter eigens konzipiert, um Ihnen die Integration Ihrer Software zu erleichtern . Die elektrische und mechanische Auslegung werden zur Verfügung gestellt, ebenso erhalten Sie Zugriff auf den gesamten PC.
Der mobile Forschungsroboter RR100 ist komplett ROS-kompatibel. Diese Kompatibilität wird außerdem für jede Roboterkomponente gewährleistet.
Im Lieferumfang der mobilen Plattform RR100 ist ein eigener PC enthalten, auf dem folgende Programme bereits vorinstalliert sind und beim Hochfahren automatisch gestartet werden:
ROS-Knoten sammeln Daten von den eingebauten Sensoren ( LiDAR 3D , Stereokamera, GPS und IMU )
Der Roboter RR100 wird mit vorinstalliertem ROS Noetic ausgeliefert . Diese von unseren Robotik-Ingenieuren durchgeführte Installation umfasst:
Ein USB-Stick ist ebenfalls im Lieferumfang des Roboters enthalten , auf dem sich die Library der erforderlichen ROS-Treiber für die Installation der drei nachstehenden Funktionen sowie ein Nutzerhandbuch für die Installation und Konfiguration dieser ROS-Treiber befindet.
Um Ihren Roboter zu customisieren und weitere Funktionen hinzuzufügen, laden wir Sie ein, das ROS-Paket Ihrer Wahl herunterzuladen und zu installieren (Mapping, Lokalisierung, Navigation).
Nachstehend eine Liste der aktuell verfügbaren Open-Source-Librarys:
| Mapping | Lokalisierung | Navigation | |
|---|---|---|---|
| 3D | LeGO-LOAM Cartographer HDL Graph SLAM |
HDL Lokalisierung MCL 3D Cartographer |
Move Base Move Base Flex |
| 2D | Gmapping Hector SLAM |
AMCL | Move Base Move Base Flex |
Alternativ helfen Ihnen unsere Ingenieure gerne bei der Auswahl und Installation der ROS-Treiber:
Diese Dienstleistung ist optional erhältlich, kontaktieren Sie uns bitte und erkundigen Sie sich nach unseren Preisen und den Details dieser verfügbaren Support-Leistungen.
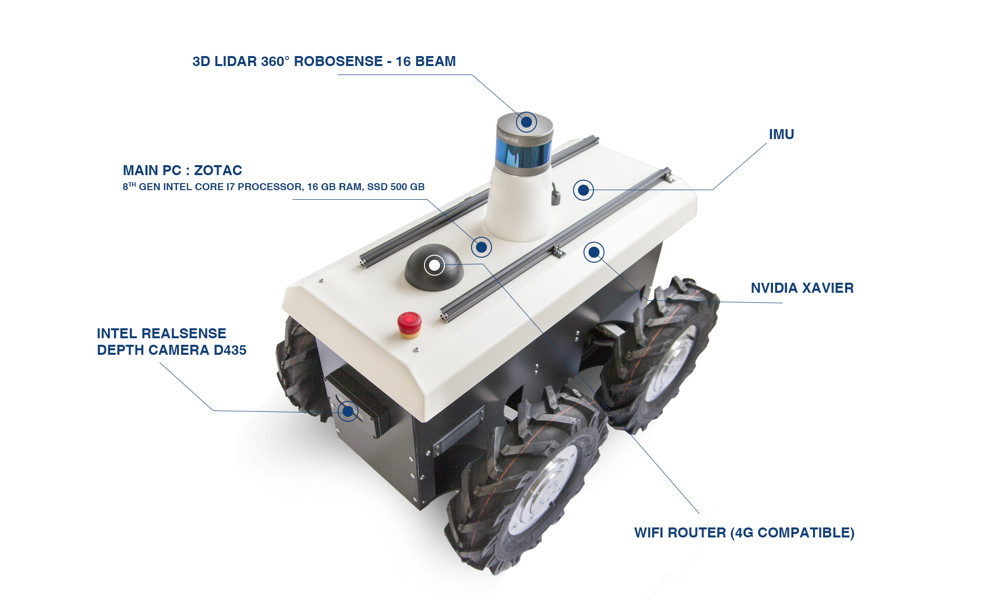
Der Roboter RR100 enthält leistungsfähige Sensoren, die alle möglichen Umweltdaten sammeln und weiterleiten.
Der RR100 wurde mit folgenden Sensoren ausgestattet:
LiDAR, IMU, Kamera und GPS sind ROS-kompatibel und wurden von unseren Ingenieuren installiert. Sie sind sofort einsatzbereit! Sämtliche Treiber und ROS-Knoten befinden sich auf dem mit dem Roboter mitgelieferten USB-Stick.
Trotz seiner Größe kann sich der mobile Roboter RR100 problemlos auch auf engstem Raum fortbewegen. Dafür sorgt seine Ackermann-Doppelachslenkung mit einem Wenderadius von nur 50 cm.
Die verschiedenen Sensoren, mit denen er ausgestattet ist, erlauben ihm eine hochpräzise Lokalisierung.
Diese Autonomie in der Navigation wird durch eine gute Batterielaufzeit (5 Stunden) sowie eine kurze Ladedauer (1 Stunde 20 Min.) unterstützt.
Eine der Besonderheiten der mobilen Basis RR100 ist, dass sie mit einem Ackermann-Doppelquerlenker ausgestattet wurde. So werden die Reifenabnutzung reduziert, der Energieverbrauch gesenkt und der Wenderadius auf 50 cm verkürzt.
Der RR100 ist dadurch in der Lage, sich selbst auf engstem Raum zu bewegen und unwegsames Gelände besser zu bewältigen.
2 BG 75X50 Dunkermotoren mit eingebauten Bremsen werden für eine optimale Notausschaltung und den Einsatz des Roboters im Parkmodus eingesetzt. Da die Bremsen nicht mit Strom versorgt werden müssen, kann der Roboter beispielsweise in Hanglage sicher stehen bleiben.
Eine weitere Besonderheit des Roboters RR100 ist das Vorhandensein einer Reservebatterie . Zusätzlich zur Lithiumbatterie besitzt der Roboter zwei Bleibatterien, die bei einem Batteriewechsel im laufenden Betrieb die Stromversorgung übernehmen. Der Bediener hat 5 Minuten Zeit, um die leere Lithiumbatterie durch eine voll geladene Batterie zu ersetzen.
Dieses System bietet drei Vorteile:
Wir haben ausreichend Platz im Inneren der Roboterplattform vorgesehen, um zahlreiche zusätzliche Komponenten unterzubringen. Außerdem stehen für Ihre Anschlüsse 4 USB-Ports sowie 4 Ethernet-Schnittstellen zur Verfügung.
Sie haben auch die Möglichkeit, Sensoren und Aktoren auf dem Robotergestell zu installieren, denn die Nutzlast beträgt 100 kg (mit 5 Motoren - Option) .
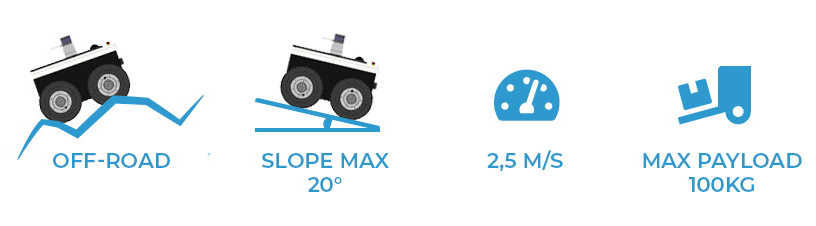
Der extrem robuste , für den Außeneinsatz bei jedem Wetter (IP 54) konzipierte RR100 mit einer beachtlichen Geschwindigkeit von 2,5 m/s und einem Gewicht von 90 kg kann Steigungen von 19° bewältigen und Hindernisse bis 13 cm Höhe überwinden.
Wir haben ihn mit Traktorrädern ausgestattet, sodass er auch mit schwierigen Geländesituationen gut zurechtkommt (Schlamm, Buckel und Mulden, Hänge usw.). Auf Anfrage können wir auch laufleichte Räder für den Betrieb im städtischen Raum oder Inneneinsatz montieren.
Der Roboter besteht aus einem geländegängigen Chassis mit Doppelquerlenker und großem Ausschlag sowie Allradantrieb und -lenkung (Ackermann-Auslegung) . Der Roboter besitzt keine Federung.
Mit seinem 3D-Laserscanner ist der Roboter in der Lage, spezifische Punkte dreidimensional zu lokalisieren und Messungen durchzuführen (z.B. Ausrichtung einer Wärmebildkamera). Bei einer Industrieinspektion können zahlreiche technischen Daten an einem Industriestandort gesammelt werden (beispielsweise im Bereich der Energie), die zur Anfertigung eines Modells des Produktionsstandorts herangezogen werden. Die automatische Inspektion ermöglicht auch präventive Instandhaltungseingriffe.
Die Gebäudezutrittssicherung ist ebenfalls ein bekannter Einsatzbereich dieser Roboter. Der RR100 kann automatische Patrouillen rund um Gebäude durchführen und eine Überwachungsrolle übernehmen. Mit den passenden Sensoren ausgestattet, kann der Roboter Personen oder Fahrzeuge an einem Ort erkennen und bei Detektion einer Intrusion einen Alarm auslösen.
 UGV")
Der mobile Roboter Shadow Runner RR100 ist eine ROS-kompatible, mobile Outdoor-Plattform für Forschung und Hochschullehre. Der in Bordeaux von den Generation Robots-Ingenieuren entwickelte und hergestellte Shadow Runner ist ein wetterfester Geländeroboter. Seine größten Vorteile sind leistungsfähige Sensoren und die ROS-Kompatibilität.
Der RR100 ist die Version für Forschung und Lehre des Roboters GR100, der professionellen, ebenfalls von unseren Ingenieuren entwickelten Version mit vorinstallierter Software-Suite für die Lokalisierung und Navigation.


















