





Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
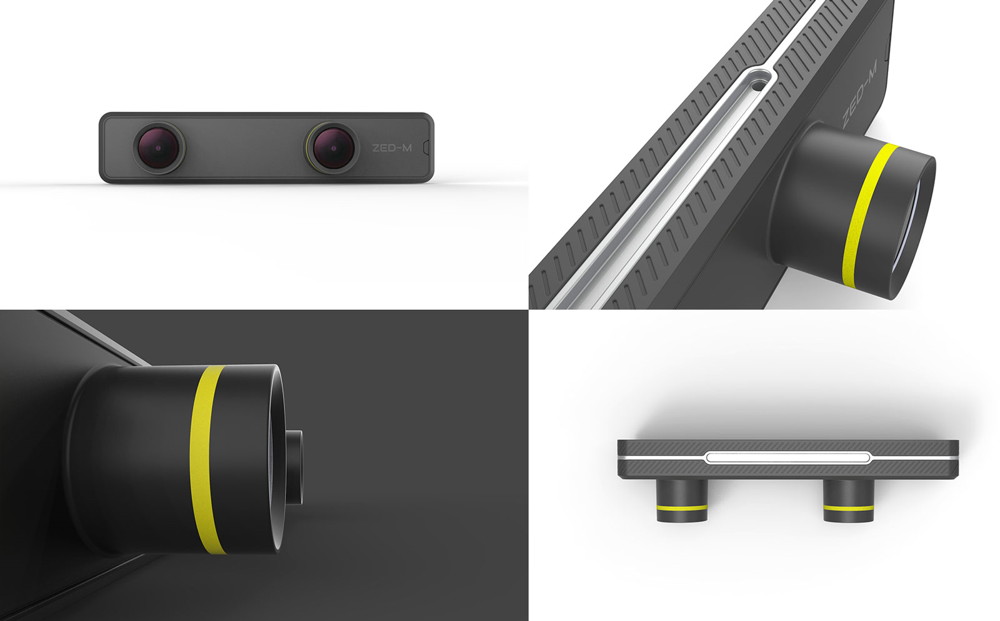
Die ZED Mini eignet sich ideal für Entwickler, Forscher und Unternehmen, die immersive Erlebnisse schaffen oder 3D-Wahrnehmung in ihre Robotiklösungen integrieren möchten.
Die ZED Mini ist eine kompakte und leichte Stereokamera für Augmented Reality (AR), Virtual Reality (VR) und Robotik. Sie verschmilzt die reale Welt in Echtzeit mit virtuellen Elementen dank fortschrittlicher Tiefenwahrnehmung und Bewegungsverfolgung.


Die ZED Mini eignet sich ideal für Entwickler, Forscher und Unternehmen, die immersive Erlebnisse schaffen oder 3D-Wahrnehmung in ihre Robotiklösungen integrieren möchten.










































