- montiert")
 - montiert")
 - montiert")
 - montiert")
 - montiert")
 - montiert")
 - montiert")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
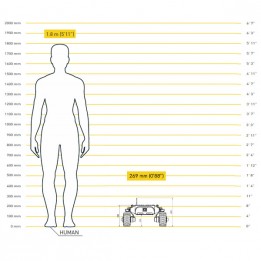
Der Leo Rover ist ein mobiler Forschungs- und Lernroboter auf der Basis des Raspberry Pi 4, der nach Herzenslust customisiert werden kann und eine breite Palette von Modulen aufweist.




 - montiert")
Der Leo Rover ist ein mobiler Forschungs- und Lernroboter auf der Basis des Raspberry Pi 4, der nach Herzenslust customisiert werden kann und eine breite Palette von Modulen aufweist.