Clearpath Mobile Außenroboter
Clearpath Robotics bietet eine Reihe von geländegängigen mobilen Robotern an, die dafür ausgelegt sind, den Herausforderungen schwieriger Außenumgebungen gerecht zu werden. Diese robusten und vielseitigen Roboter ermöglichen eine effektive Automatisierung von Prozessen in Bereichen wie wissenschaftlicher Forschung, Landwirtschaft, Verteidigung und industrieller Erkundung. Entdecken Sie drei führende Modelle für Außenanwendungen: Jackal, Husky A300 und Warthog.
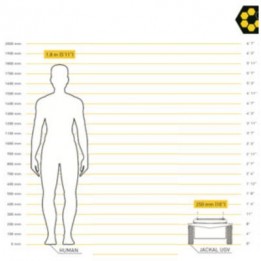
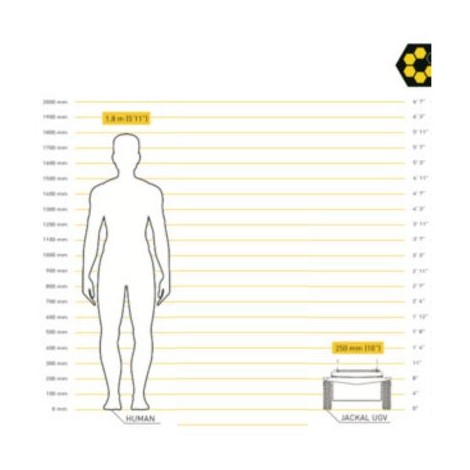
Jackal
Jackal ist ein kompakter und wendiger geländegängiger mobiler Roboter, der speziell für anspruchsvolle Außenumgebungen entwickelt wurde. Mit seinen integrierten Sensoren und der ROS-Kompatibilität ist er ideal für die Robotikforschung, die Datenerfassung im Feld und Erkundungsanwendungen. Seine kleine Größe ermöglicht es ihm, sich leicht über unwegsames Gelände zu bewegen, während er leicht und schnell bleibt.
Hauptmerkmale:
- Abmessungen: 508 x 430 x 250 mm
- Nutzlast: bis zu 20 kg
- Maximale Geschwindigkeit: 2 m/s
- ROS-Kompatibilität
Husky A300
Der Husky A300 ist eine geländegängige Plattform mit hoher Kapazität, die für den Transport schwerer Lasten und die Erledigung komplexer Aufgaben in Außenumgebungen konzipiert wurde. Dieser Roboter ist ideal für Projekte, die Leistung, Stabilität und Anpassungsfähigkeit erfordern, insbesondere für Erkundungs- und Forschungsrobotik. Mit verlängerter Autonomie und Kompatibilität mit zahlreichen Sensoren ist er ein wertvolles Werkzeug für Langzeitmissionen.
Hauptmerkmale:
- Abmessungen: 990 x 698 x 381 mm
- Nutzlast: bis zu 100 kg
- Maximale Geschwindigkeit: 2 m/s
- Autonomie: bis zu 12 Stunden
- IP54 Schutzklasse
- ROS 2 Jazzy-Kompatibilität
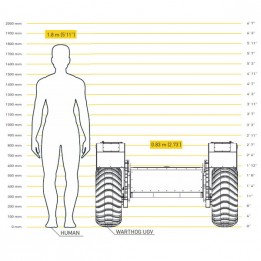
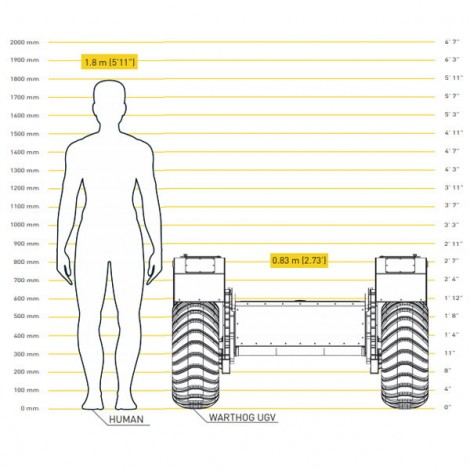
Warthog
Warthog ist eine schwere, geländegängige Roboterplattform, die für die extremsten Umgebungen ausgelegt ist. Mit seiner Fähigkeit, unwegsames, sumpfiges Gelände zu durchqueren und seiner Wasserleistung ist er perfekt für militärische, landwirtschaftliche oder Erkundungsanwendungen. Dank seiner Kompatibilität mit einer breiten Palette von Sensoren und Geräten lässt sich der Warthog problemlos an spezifische Missionen wie 3D-Kartierung oder Überwachung anpassen.
Hauptmerkmale:
- Abmessungen: 1511 x 1380 x 830 mm
- Nutzlast: bis zu 272 kg
- Maximale Geschwindigkeit: 4 km/h im Wasser und 18 km/h an Land
- Autonomie: bis zu 6 Stunden
- IP65 Schutzklasse (vollständig tauchfähig)
- ROS-Kompatibilität







Sie möchten einen mobilen Hardcore-Roboter kennenlernen, der auf Feldwegen ebenso schnell vorankommt wie auf dem Linoleumboden in der Küche? Dann ist das unbemannte Landfahrzeug Jackal genau das Richtige für Sie, eine kompakte mobile Roboterplattform, die schnell und wendig ist und allerhand aushält!

Der mobile ROS-Roboter Warthog ist eine Landdrohne und ein Amphibienfahrzeug zugleich, der sich einer beeindruckenden Größe und Nutzlast rühmen kann. Dafür ist er außerdem ziemlich wendig und schnell!


Die Bodendrohne A300 von Clearpath Robotics ist eine robuste mobile Plattform, die 100 kg tragen kann, eine Betriebsdauer von bis zu 12 Stunden hat und mit ROS 2 Jazzy kompatibel ist, um Sensoren einfach integrieren zu können.


Die Konstruktionsabteilung von Génération Robots (GR Lab) hat ein ROS-Forschungs- und Entwicklungskit entwickelt, anpassbar an alle unsere mobilen Basen: AgileX, Clearpath, Husarion...