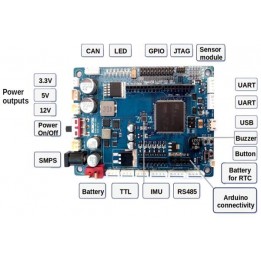
Beschreibung des Controllers CM-530

Der Controller CM-530 enthält einen Mikrocontroller ARM Cortex STM32F103RE, 3-Pin-Anschlüsse für die Kommunikation per TTL und 5-Pin-Anschlüsse für Peripheriegeräte (z.B. Sensoren). Er steuert Dynamixel Servomotoren der Baureihen MX-xxT (für den humanoiden Roboter DarwinOp – Achtung, die Servomotoren MX-xxR verwenden das Protokoll RS485) und AX (Bioloid-Sets). Er unterstützt die Kommunikation per Bluetooth und Zigbee.
Anschlüsse des Controllers CM-530
- Anschluss an den PC: Das im Lieferumfang inbegriffene USB-Kabel dient dazu, den Controller CM-530 an den Computer anzuschließen und den Code herunterzuladen.
- Anschluss für Kommunikationsperipherie: Anschluss eines drahtlosen Funkmoduls ZIG-110, eines IR-Empfängers und anderer Module.
- Batterieanschluss: Dieser Steckverbinder dient der Stromversorgung des Roboters über eine Bioloid-Batterie (11,1 V LiPo, nicht im Lieferumfang inbegriffen).
- Stromanschluss: Dieser Steckverbinder sorgt für den Netzanschluss des Roboters über ein Stromkabel (SMPS-Schaltnetzteil 12V 5A, nicht im Lieferumfang inbegriffen).
- Power-LED: Kontrolleuchte, die den Betriebsstatus des Boards anzeigt.
- Hauptschalter: Zum Ein- und Ausschalten des Controllers CM-530. Damit kann der Roboter deaktiviert werden.
- MODE-Taste: Wechseln der Betriebsmodi des Controllers CM-530. Die drei LEDs zeigen den aktiven Betriebsmodus an:
- MANAGE: Dynamixel Management Modus zum Testen des Betriebs der Servomotoren Dynamixel AX und MX. Dieser Modus wird automatisch aktiviert, wenn der Controller an den RoboPlus Manager angeschlossen wird.
- PROGRAM: Modus Bewegungsbearbeitung – bei einer Bearbeitung durch RoboPlus Motion. Dieser Modus wird automatisch aktiviert, wenn der Controller CM-530 an RoboPlus Motion angeschlossen wird.
- PLAY: Modus Aufgabenbearbeitung. Dieser Modus dient dem Download eines neuen Programms mit RoboPlus Task sowie seiner Ausführung.
- START-Taste: Zum Starten des gewählten Modus.
- Status-LED: Die LED TxD leuchtet auf, wenn der Controller CM-530 Daten nach außen überträgt. RxD leuchtet auf, wenn der Controller CM-530 Daten von außen erhält, und AUX ist frei verfügbar und kann bei der Nutzung von Aufgaben ein- und ausgeschaltet werden.
- Tasten U / L / D / R: Werden bei der Programmausführung als Eingang verwendet. Dadurch können mithilfe des Controllers CM-530 Steuerbefehle an den Roboter gesandt werden.
- 3-Pin Kabelstecker: Werden für den Anschluss der Servomotoren Dynamixel mithilfe der TTL-Kommunikation verwendet, d.h. der Baureihen AX oder MX-xxT. Die Servomotoren können in Serie geschaltet werden.
- Anschlussport für Peripheriegeräte (5-Pin): Einsatz beim Anschluss anderer Komponenten, beispielsweise Sensoren.
Technische Daten des Controllers CM-530
- Gewicht: 54 g
- Controller: ARM Cortex STM32F103RE
- Betriebsspannung: 6 V ~ 15 V. Empfohlene Betriebsspannung: 11,1 V (3 LiPo-Zellen).
- Verbrauch
- Im Ruhezustand: 50 mA
- Höchstspannung für Ein-/Ausgänge: 300 mA
- Höchstspannung: 10 A (Sicherung)
- Temperatur: -5℃ ~ 70℃
- Integrierte Sensoren:
- Anschlüsse
- 6 Ports (5-Pin) für OLLO-kompatible Peripheriegeräte
- 5 Ports (3-Pin) für Dynamixel Servomotoren, die das Kommunikationsprotokoll TTL verwenden (Servomotoren AX und MX-xxT)