Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
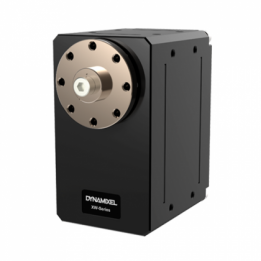
Il servomotore Dynamixel XW540-T140-R di Robotis è l'ultima novità di una famiglia già ampia di servomotori ad alta definizione. Cosa rende unico questo servomotore? La sua resistenza all'acqua, che lo rende adatto alle piattaforme anfibie e alle basi mobili 100% all-terrain.
I robotisti amatoriali, i ricercatori e gli sviluppatori industriali conoscono bene le virtù dei servomotori Dynamixel della serie X . Il servomotore XW540-T140-R soddisfa tutte le specifiche grazie all'alta risoluzione, alla velocità di trasmissione e alle molteplici opzioni di programmazione .
Se sei alla ricerca di un accessorio robotico ultrapreciso che offra un feedback dettagliato e un'ampia gamma di modalità di controllo, la serie X fa al caso tuo. Essa riunisce un numero crescente di modelli di varia velocità e potenza, con connessioni TTL o, come questa, RS485 . Nuova aggiunta alla già vasta gamma del produttore, la serie X-Waterproof apre nuove porte ai robotisti in cerca di avventure acquatiche.
Robotis ha suddiviso i suoi servomotori impermeabili in due modelli: il modello XW540-T260-R ha una velocità di 40 giri/minuto. Si tratta di un potente servomotore di coppia, in grado di operare su terreni difficili.
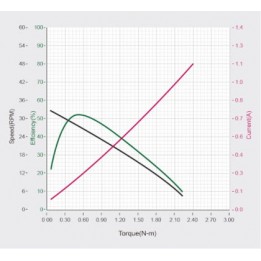
Il servomotore XW540-T140-R Dynamixel ha una velocità quasi doppia, ma una coppia inferiore. È il servomotore da scegliere se si desidera creare una macchina da esplorazione veloce senza un carico pesante .
La differenza evidente tra questi due servomotori è il loro grado di protezione. Il grado IP68 corrisponde alla massima protezione in termini di penetrazione della polvere. Il suo grado di impermeabilità significa che può rimanere immerso fino a 24 ore, a seconda della profondità (tra 1 e 3 metri) .
Approfitta di queste numerose risorse online gratuite per imparare tutto sul tuo servomotore Dynamixel XW540-T140-R.
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
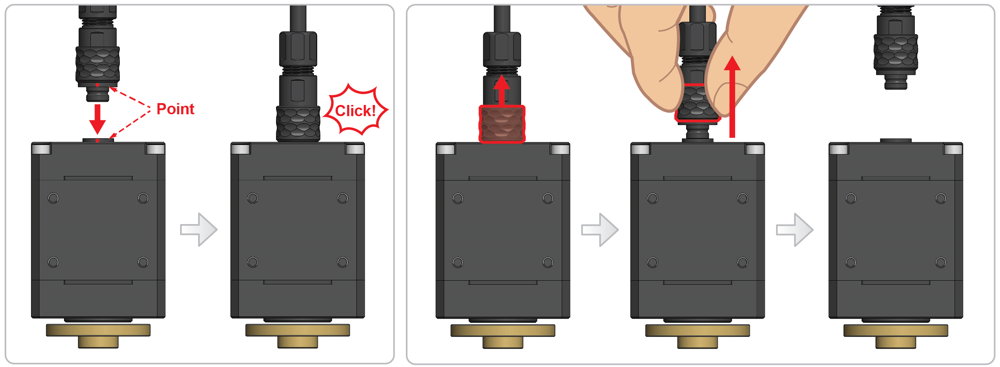
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XW540-T140-R di Robotis è l'ultima novità di una famiglia già ampia di servomotori ad alta definizione. Cosa rende unico questo servomotore? La sua resistenza all'acqua, che lo rende adatto alle piattaforme anfibie e alle basi mobili 100% all-terrain.