Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
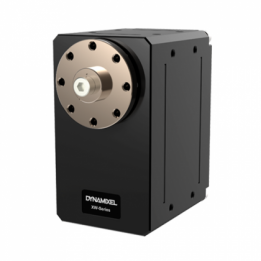
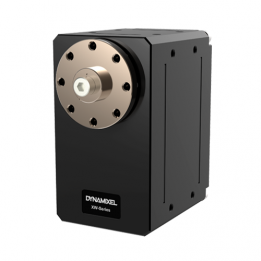
Barca, veicolo anfibio, scooter acquatico... Sogni di mettere alla prova il tuo talento robotico sull'acqua? Il servomotore impermeabile Dynamixel XW540-T260-R è il tuo biglietto per nuove esperienze.
No, il servomotore Dynamixel XW540-T260-R non è impermeabile al 100%. Ma grazie alla sua struttura impermeabile , ha ottenuto un punteggio molto onorevole di 68 nello standard di protezione internazionale:
Cosa significa in pratica? Questo servomotore della serie Dynamixel X può rimanere immerso a una profondità compresa tra 1 e 3 metri, per circa 30 minuti . Abbastanza per avviare qualche esplorazione subacquea con l'attrezzatura giusta: telaio antiruggine e sensori impermeabili .
Per il resto, questo modello XW540-T260-R è degno della serie equivalente di servomotori Robotis .
Come promemoria, i servomotori Dynamixel serie X fanno parte dell'ultima generazione di servomotori sviluppati da Robotis. Si tratta di servomotori ad alta definizione che offrono diverse modalità operative, tra cui il controllo PWM, e un feedback ultra completo sui parametri operativi della macchina.
Il design accurato di questo servomotore metallico con connessione RS485 e le sue prestazioni in termini di velocità di trasmissione, risoluzione e programmazione ne fanno un servo impermeabile di prima classe, uno dei must per gli appassionati di progettazione robotica all'avanguardia.
Sfrutta le numerose risorse online gratuite per imparare tutto sul tuo servomotore Dynamixel XW540-T260-R.
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
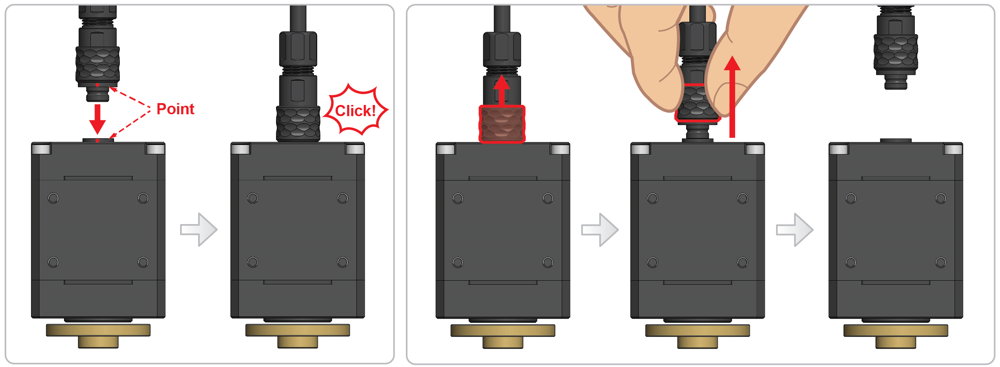
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Barca, veicolo anfibio, scooter acquatico... Sogni di mettere alla prova il tuo talento robotico sull'acqua? Il servomotore impermeabile Dynamixel XW540-T260-R è il tuo biglietto per nuove esperienze.