")
")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,38 € per l'ecotassa
Questo kit per OpenManipulator RM-X52 è offerto qui con i suoi servomotori. Consente di aggiungere nuove funzionalità alla piattaforma robotica TurtleBot3 Waffle o Waffle Pi.
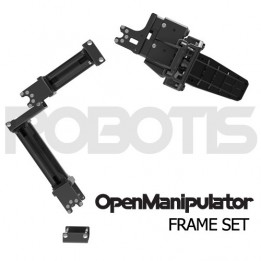
Questo braccio robotico compatibile con ROS è stato progettato come versione compatta dell' OpenManipulator RM-X52 , uno degli accessori TurtleBot3 che consentono di estendere le funzionalità della piattaforma mobile. Viene presentato come kit, con tutte le parti meccaniche e gli strumenti necessari. Include anche 5 servomotori Dynamixel compatibili TTL per pilotare i 5 giunti disponibili.
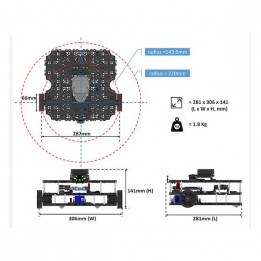
Con un peso di soli 700 g, questo OpenManipulator è in grado di gestire oggetti fino a 500 g, grazie al carico utile dei suoi servi. La pinza può raccogliere oggetti di varie dimensioni, da 2 a 7,5 cm di larghezza.
Questo manipolatore può essere facilmente installato su un Turtlebot3 Waffle Pi o su un Turtlebot3 Waffle dotato di un controller OpenCR. È possibile programmarlo direttamente utilizzando il controller o collegarlo al PC (è necessario il connettore U2D2 Dynamixel/PC ). Include il codice sorgente e l'ambiente di sviluppo necessario per configurarlo.
OpenManipulator gode di un supporto open source al 100%, per cui è possibile sviluppare le proprie applicazioni, installare molto software libero e trovare soluzioni ai propri problemi grazie alla comunità di inventori.
")
Questo kit per OpenManipulator RM-X52 è offerto qui con i suoi servomotori. Consente di aggiungere nuove funzionalità alla piattaforma robotica TurtleBot3 Waffle o Waffle Pi.