- assemblato")
 - assemblato")
 - assemblato")
 - assemblato")
 - assemblato")
 - assemblato")
 - assemblato")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
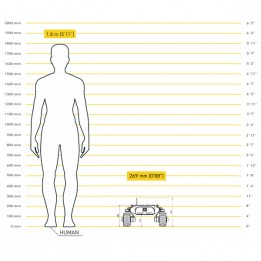
Leo Rover è un robot mobile per la ricerca e l'istruzione che gira su Raspberry Pi 4 e che può essere personalizzato a piacere con un'ampia gamma di moduli!




 - assemblato")
Leo Rover è un robot mobile per la ricerca e l'istruzione che gira su Raspberry Pi 4 e che può essere personalizzato a piacere con un'ampia gamma di moduli!