Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
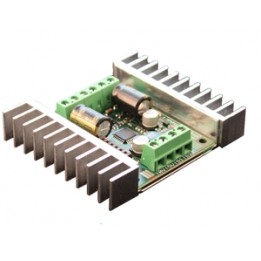
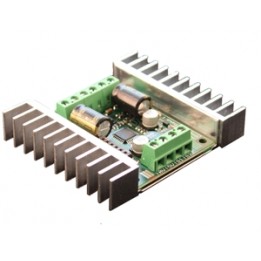
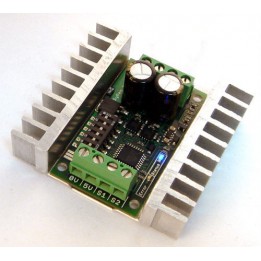
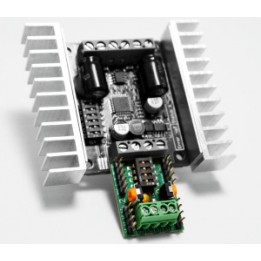
Le contrôleur Roboteq SBL 1360 A vous permet de piloter un moteur jusqu'à 30 A et 60 V, équipé d'un capteur à effet Hall ou sans capteur grâce au mode de contrôle trapézoïdal.
Ce contrôleur Roboteq est conçu pour entraîner un moteur équipé d'un capteur à effet Hall. Les informations qui lui sont transmises par le capteur lui permettent d'assurer au moteur une rotation douce et continue. Il peut aussi prendre en charge un moteur sans capteur : il suffit dans ce cas d'utiliser le mode de contrôle trapézoïdal sans capteur.
La communication par bus CAN vous permet d'installer jusqu'à 127 contrôleurs sur le même réseau au moyen d'une seule paire torsadée. Cela implique de pouvoir piloter un grand nombre de moteurs CC en évitant les câblages complexes.
Configurez et personnalisez votre contrôleur de moteur brushless à l'aide du langage MicroBasic. Pour vous aider à éditer des lignes de code et les compiler de manière intuitive, Roboteq a conçu un utilitaire PC, Roborun+. Ce dernier facilite votre travail de programmation par le biais de menus, de boutons et de glissières. La licence Roborun+ est accessible en libre téléchargement, mais vous pouvez également opter pour Roborun+ Pro, sa version payante, qui autorise un plus grand volume de code source.
Faites le plein de documentations sur le contrôleur de moteur brushless Roboteq SBL 1360 A grâce aux ressources que nous avons rassemblées pour vous :

Le contrôleur Roboteq SBL 1360 A vous permet de piloter un moteur jusqu'à 30 A et 60 V, équipé d'un capteur à effet Hall ou sans capteur grâce au mode de contrôle trapézoïdal.