")
")
")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
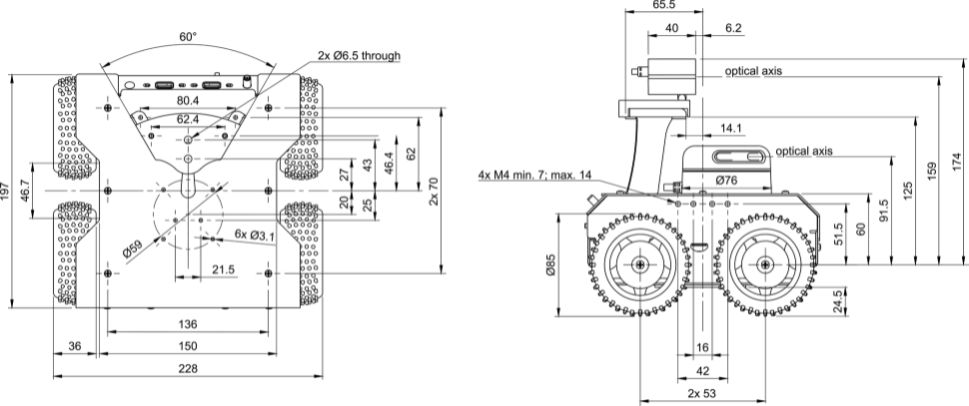
Le Robot Mobile ROSbot 2R est une plateforme robotique avancée conçue pour offrir une expérience complète d'apprentissage et de développement dans le domaine de la robotique autonome.
Basé sur le processeur puissant Raspberry Pi 4 (ARM64), le ROSbot 2R est renforcé par une gamme de ressources d’apprentissage complète (manuels, modèles de simulation Gazebo, tutoriels ROS etc), en faisant un choix incontournable pour la Recherche et l'Apprentissage sur les véhicules autonomes. De plus, cette plateforme mobile à 4 roues avec moteurs DC offre une maniabilité précise et une grande agilité.

ROSbot est une plateforme robotique abordable pour le développement rapide de robots autonomes. Il peut servir de base à des robots de service personnalisés, des robots d’inspection et des robots travaillant en essaims.
Que vous soyez étudiant, chercheur ou passionné de robotique, le ROSbot 2R sera votre partenaire idéal pour explorer les horizons de la technologie robotique moderne.
Découvrez également la version ROSBOT 2 Pro basée sur le processeur Intel Atom x5 Z8350 et comprennant un Slamtec RPLIDAR A3.
La plateforme robotique ROSbot 2R comprend :
")
Le Robot Mobile ROSbot 2R est une plateforme robotique avancée conçue pour offrir une expérience complète d'apprentissage et de développement dans le domaine de la robotique autonome.







