



Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Le servomoteur Dynamixel XC430-T240BB-T est un composant robotique résistant, qui propose de nombreux modes d'exploitation, une configuration simple à monter et une optimisation de l'énergie grâce à une diminution de l'intensité du courant.
La série de servomoteurs XC430 de ROBOTIS s'enrichit avec l'ajout du modèle XC430-T240BB-T. Ce dernier est muni d'encodeurs magnétiques discrets permettant des rotations continues de 360° à une vitesse maximale de 70 rotations par minute. Il offre un couple impressionnant de 1,9 N.m à une tension de 12V, tout en conservant un poids très léger de 65 g. Cette combinaison de puissance et de légèreté fait de lui un servomoteur polyvalent et d'une grande efficacité.

ROBOTIS a retravaillé et amélioré le système de gestion des câbles dans sa série Dynamixel X, ce qui renforce la fiabilité du produit. À la différence de la série AX/MX où les câbles sont connectés à l'arrière du servomoteur, cette innovation diminue la contrainte sur les câbles et réduit leur exposition.

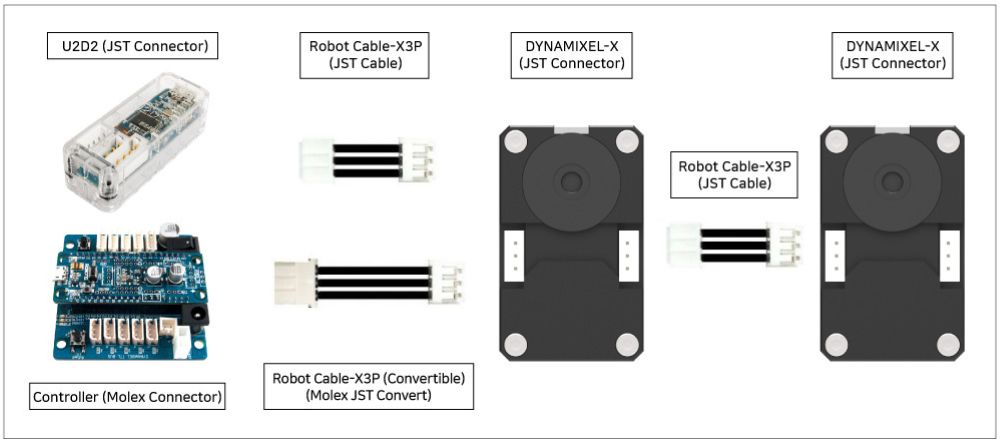
Ce que contient la boîte
Trouvez les bonnes informations sur le servomoteur Dynamixel XC430-T240BB-T avec cette liste de liens rassemblés spécialement pour vous :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel XC430-T240BB-T est un composant robotique résistant, qui propose de nombreux modes d'exploitation, une configuration simple à monter et une optimisation de l'énergie grâce à une diminution de l'intensité du courant.












{kind=link}