Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.


 |  | |
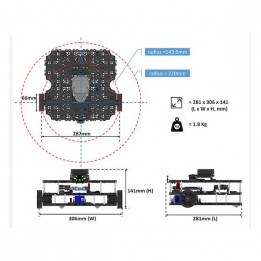
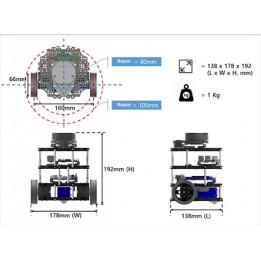
| TurtleBot 4 Standard | TurtleBot 4 Lite | |
| Dimensions | 341 x 339 x 351 mm | 341 x 339 x 192 mm |
| Poids | 3,9 kg | 3,3 kg |
| Vitesse max. | 0,31 m/s | 0,31 m/s |
| Charge utile max. | 9 kg - Par défaut 15 kg - Configuration custom | 9 kg - Par défaut 15 kg - Configuration custom |
| Autonomie | 2h30-4h (en fonction de la charge) | 2h30-4h (en fonction de la charge) |
| Caméra | OAK-D-PRO | OAK-D-LITE |
| LiDAR | RPLIDAR-A1 | RPLIDAR-A1 |
| Ports accessibles (USB et alimentation) | Oui | Non |
| Ecran OLED | Oui | Non |
| Plaque de montage supérieure | Oui | Non |
| Software | ROS 2 | ROS 2 |
| Ordinateur de bord | Raspberry Pi 4 B (4 Go) | Raspberry Pi 4 B (4 Go) |
Consultez notre FAQ ou contactez-nous à help@generationrobots.com en cas de problème avec votre robot.

Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.