





Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
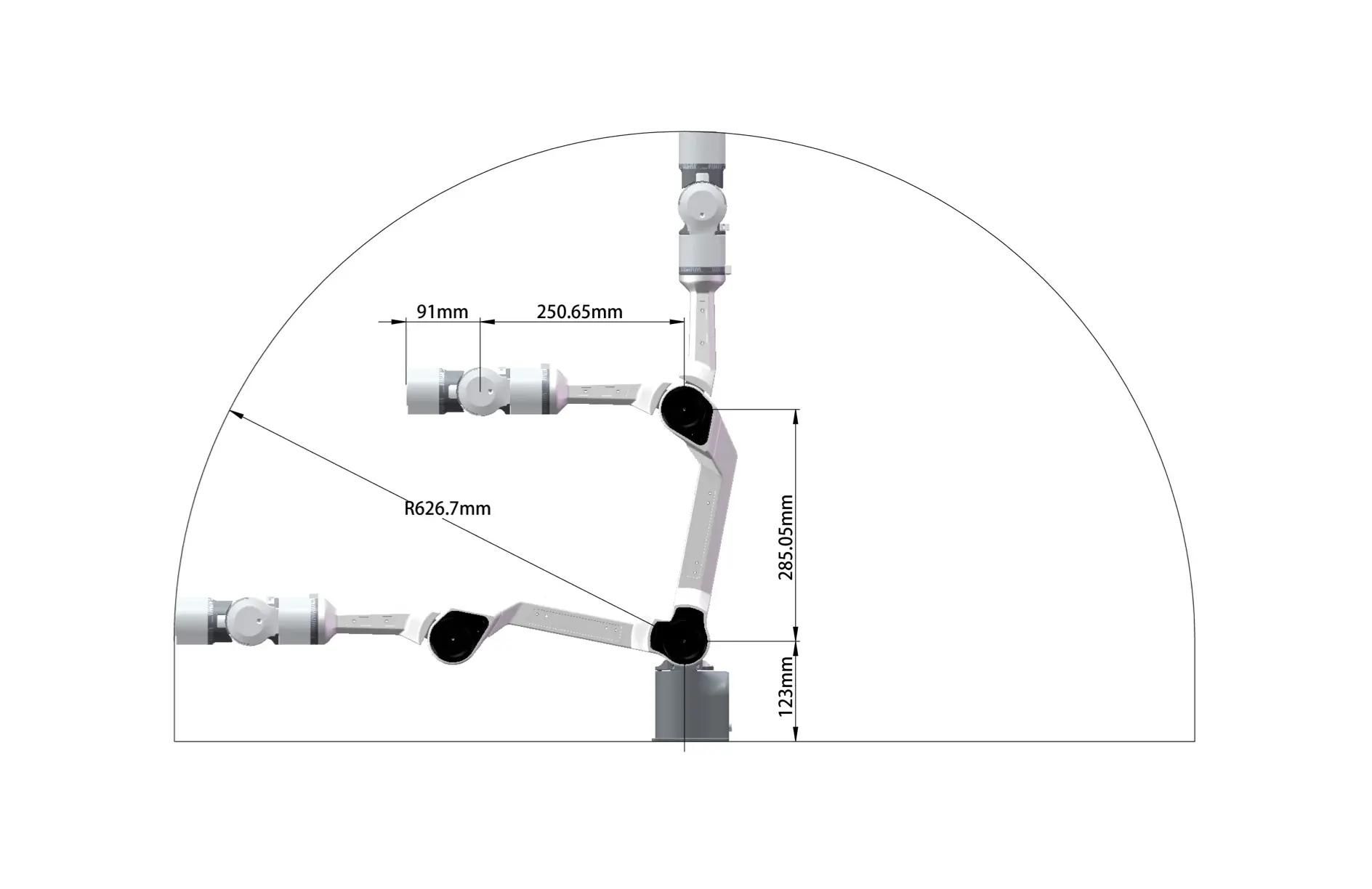
Le PiPER d'AgileX Robotics est un bras robotique léger et polyvalent, offrant un contrôle précis et fiable même dans des environnements extrêmes, idéal pour des applications variées.

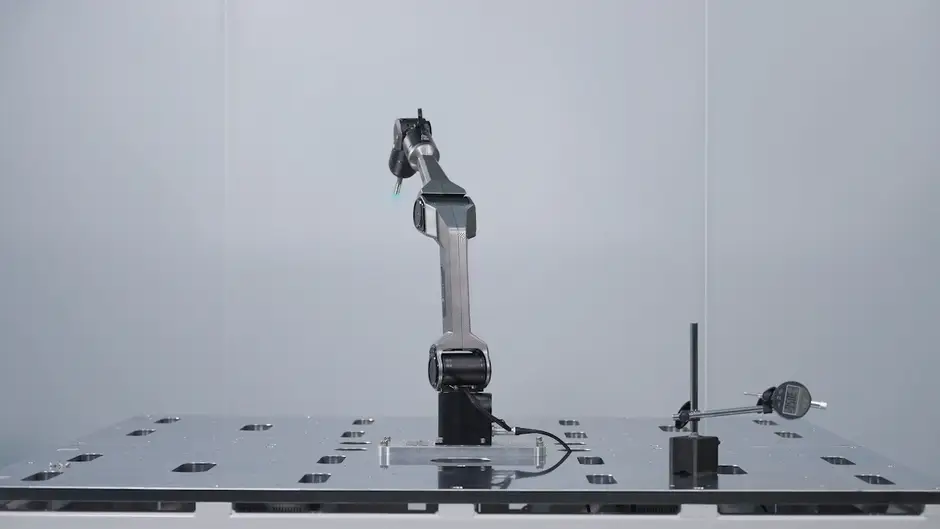

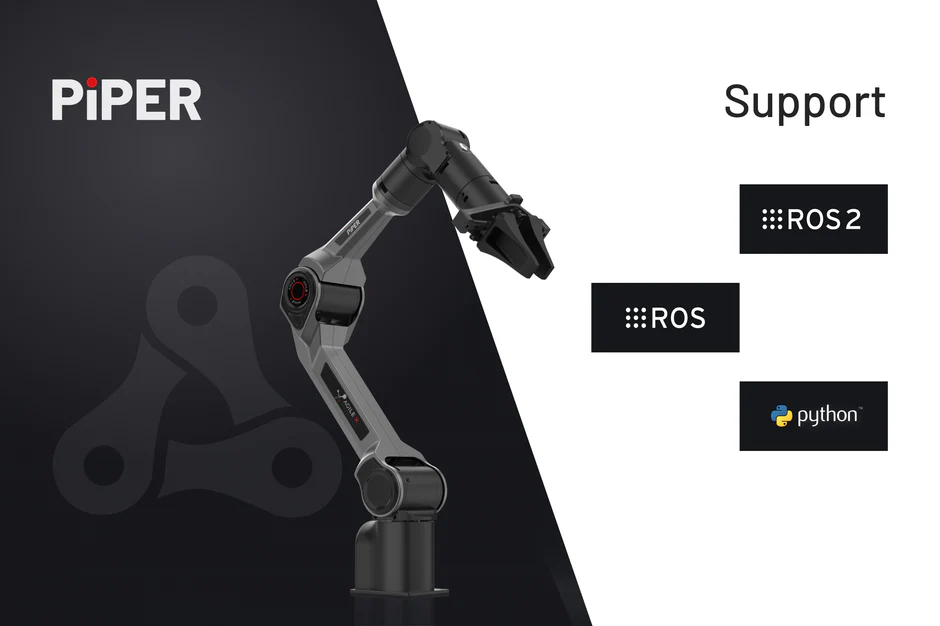
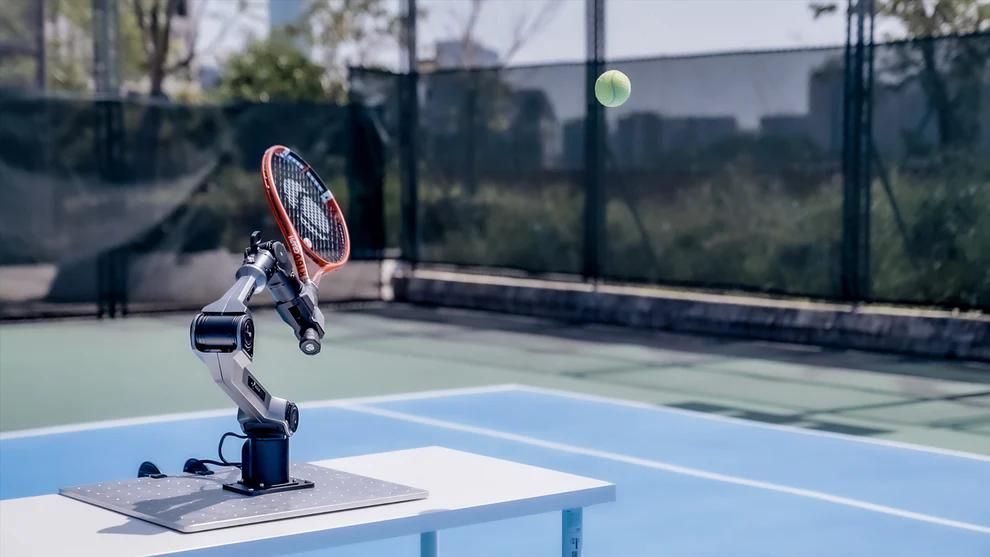




Le PiPER d'AgileX Robotics est un bras robotique léger et polyvalent, offrant un contrôle précis et fiable même dans des environnements extrêmes, idéal pour des applications variées.





























