Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
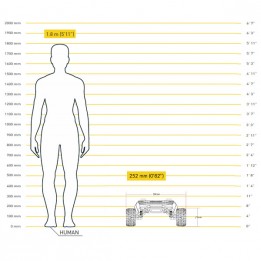
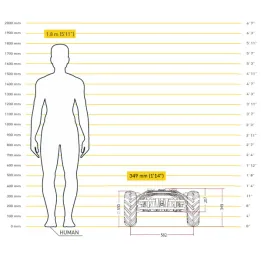
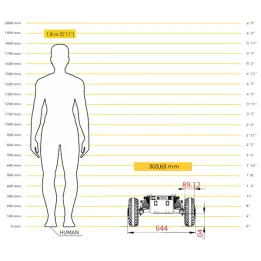
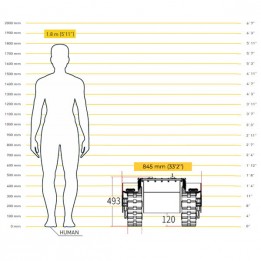
Le kit Agilex Autopilot offre un système complet vous permettant d'assurer la navigation autonome par GPS d'un châssis robotique performant. Programmable sur Linux, il s'agit d'une plateforme 100 % ROS pour le développement d'une large variété d'applications.
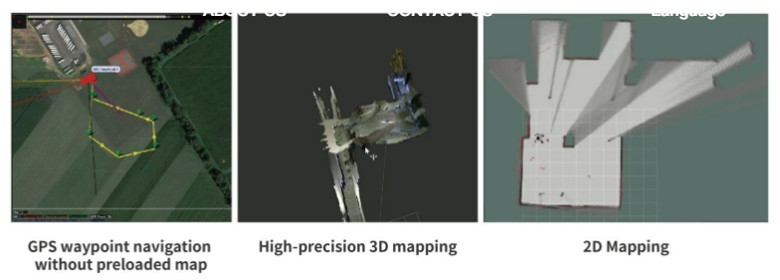



Le kit Agilex Autopilot offre un système complet vous permettant d'assurer la navigation autonome par GPS d'un châssis robotique performant. Programmable sur Linux, il s'agit d'une plateforme 100 % ROS pour le développement d'une large variété d'applications.