





Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
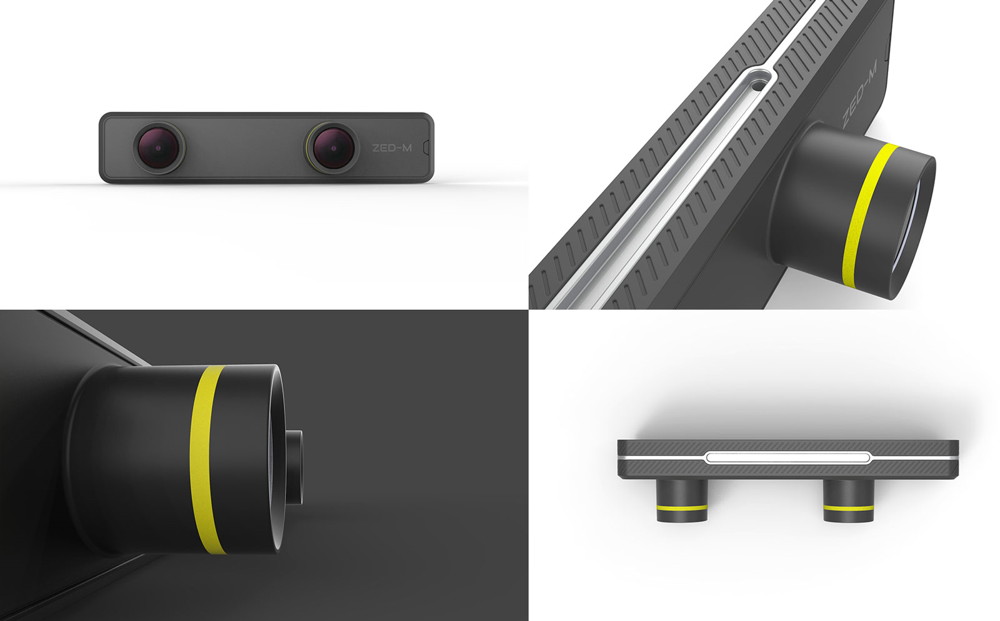
ZED Mini est une caméra stéréoscopique dédiée à la réalité augmentée et aux réalités mélangées. Concrètement, elle est capable de superposer des objets de réalité virtuelle à la réalité… et transformer votre monde en jeu vidéo IRL !
La ZED Mini est une caméra stéréo compacte et légère conçue pour la réalité augmentée (AR), la réalité virtuelle (VR) et la robotique. Elle fusionne le monde réel avec des éléments virtuels en temps réel grâce à sa technologie avancée de perception de profondeur et de suivi de mouvement.


ZED Mini est une caméra stéréoscopique dédiée à la réalité augmentée et aux réalités mélangées. Concrètement, elle est capable de superposer des objets de réalité virtuelle à la réalité… et transformer votre monde en jeu vidéo IRL !










































