Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
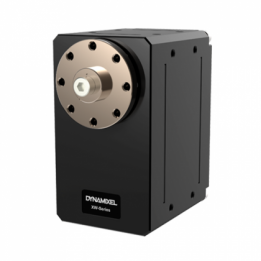
Bateau, véhicule amphibie, scooter aquatique… Vous rêvez de tester vos talents de roboticien sur l'eau ? Le servomoteur Dynamixel waterproof XW540-T260-R est votre ticket d'entrée pour de nouvelles expériences.
Non, le servomoteur Dynamixel XW540-T260-R n'est pas 100 % étanche. Mais sa conception waterproof lui permet de décrocher le score très honorable de 68 dans la norme de protection internationale :
Concrètement ? Ce servomoteur Dynamixel série X peut rester immergé entre 1 et 3 mètres de profondeur, environ 30 minutes. De quoi lancer quelques explorations sous-marines avec le matériel adéquat : châssis antirouille et capteurs étanches.
Pour le reste, ce modèle XW540-T260-R reste digne des servomoteurs de série équivalente chez Robotis.
Pour rappel, donc, les servomoteurs Dynamixel de série X font partie des servos dernière génération développés par Robotis. Des servomoteurs haute définition, offrant de multiples modes de fonctionnement avec par exemple le contrôle de la PWM, et un feedback ultra-complet sur les paramètres de fonctionnement de l'engin.
La conception très soignée de ce servomoteur en métal à connexion RS485, ses performances en termes de vitesse de transmission, de résolution ou de programmation, en font un servo waterproof de première catégorie, l'un des must pour les amateurs de conception robotique pointue.
Profitez de ces nombreuses ressources en ligne et libres d'accès pour tout apprendre sur votre servomoteur Dynamixel XW540-T260-R.
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
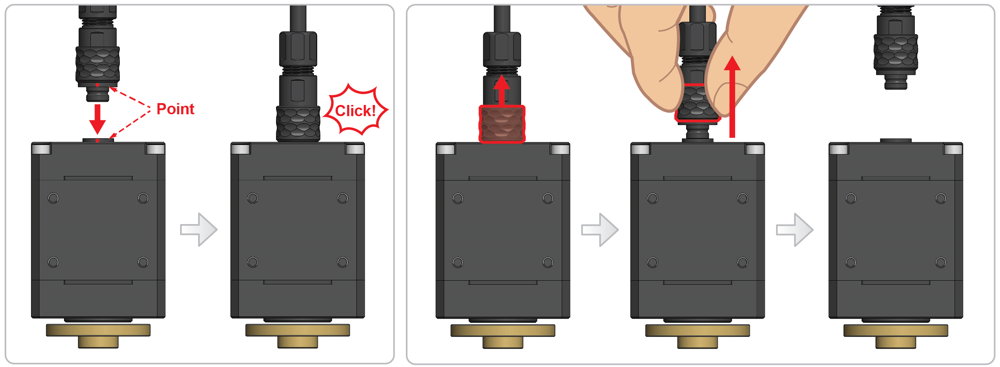
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Bateau, véhicule amphibie, scooter aquatique… Vous rêvez de tester vos talents de roboticien sur l'eau ? Le servomoteur Dynamixel waterproof XW540-T260-R est votre ticket d'entrée pour de nouvelles expériences.