Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,05 € d'éco-participation
Dynamixel frappe un grand coup dans le monde des servomoteurs avec le modèle 2XC430-W250-T. Un seul servomoteur Dynamixel pour actionner deux axes. Deux degrés de liberté pour un seul servomoteur !
Le servomoteur 2 axes 2XC430-W250-T ressemble en bien des points aux servomoteurs de série X à connexion TTL de chez Robotis. Il s'agit donc d'un servomoteur compact, robuste, programmable de A à Z grâce au SDK Dynamixel.

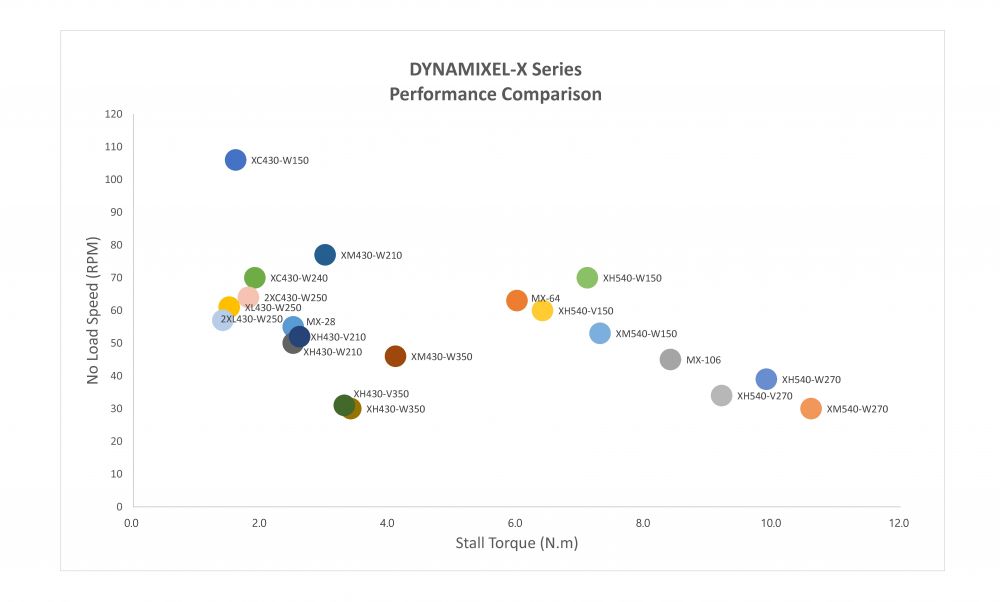
Les servomoteurs Dynamixel de dernière génération proposent une résolution de 4096 positions par révolution. Ils permettent de multiples modes de contrôle (vitesse, PWM, position…), et un retour d'information ultra-complet. L'adressage incluant jusqu'à 253 IP configurables permet la création de projets très complexes.
Ce qui fait l'originalité du 2XC430-W250-T ? La gestion simultanée de 2 axes de mouvements.
Généralement, dans tout projet robotique articulé, on définit le nombre de degrés de liberté en déterminant le nombre de servomoteurs connectés. Le servomoteur 2XC430-W250-T réussit à proposer le même niveau de performance qu'un servomoteur mono-axe.
Et pourtant, il gère deux axes de mouvements, le premier placé à l'arrière, le second, sur le côté. La conception du servo lui permet une mise en place des câbles évitant tout frottement.
Palonniers libres HN11-I101 pour l'adaptation de pièces de structures vendus séparément.
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Dynamixel frappe un grand coup dans le monde des servomoteurs avec le modèle 2XC430-W250-T. Un seul servomoteur Dynamixel pour actionner deux axes. Deux degrés de liberté pour un seul servomoteur !