Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
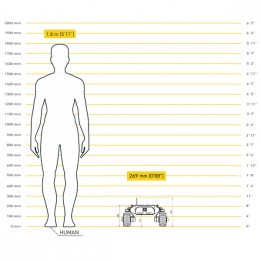
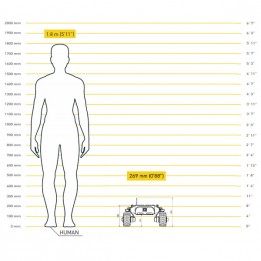
Le petit robot mobile Leo Rover se dévoile de A à Z dans ce kit de construction. Leo Rover Developer Kit contient tout le nécessaire pour assembler le robot. Equipé d'une carte Raspberry Pi, d'un puissant contrôleur et d'un environnement logiciel basé ROS, il est prêt à être programmé !
Leo Rover est une plateforme robotisée mobile open-source basée ROS, basée sur Raspberry Pi 4. Il peut gérer jusqu'à 5 kg de charge. Cela signifie en pratique que vous êtes libre de le personnaliser avec tous les accessoires imaginables : pince ou bras robotique, caméra, capteurs, IMU, etc.

Avec Leo Rover Developer Kit, les enseignants peuvent mettre à la disposition de leurs étudiants un kit, composé de tout le matériel nécessaire pour assembler le robot.
Ce kit permet un montage rapide de la plateforme, tout en offrant une vision approfondie du fonctionnement du robot.
Il vous suffit de vous munir de quelques clés Allen et clés plates à tête hexagonale, d'un étau d'établi et d'un fer à souder.
Open Source, ce robot mobile en kit à 4 roues motrices permet le développement d'innombrables add-ons. Il peut s'agir aussi bien de pièces robotisées à imprimer en 3D, que de nouvelles applications robotiques. Vous pourrez de plus compter sur une vaste communauté d'inventeurs pour améliorer votre projet.

Le kit Leo Rover Developer peut ainsi s'adapter à tous vos projets d'enseignement : pilotage à distance, navigation intelligente, surveillance et exploration, station météo mobile, etc.
Roues
Batterie
Caméra
Réseau
Vidéo unboxing du robot mobile Leo Rover
Tout est disponible ici en open source pour en apprendre plus sur votre Leo Rover !

Le petit robot mobile Leo Rover se dévoile de A à Z dans ce kit de construction. Leo Rover Developer Kit contient tout le nécessaire pour assembler le robot. Equipé d'une carte Raspberry Pi, d'un puissant contrôleur et d'un environnement logiciel basé ROS, il est prêt à être programmé !