Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
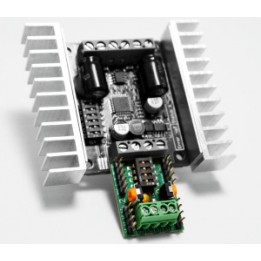
Le contrôleur SDC 3260 embarque un microcontrôleur 32 bits et un encodeur à quadrature pour produire des algorithmes de contrôle du mouvement à un haut degré de fiabilité. Il dispose de 3 canaux de contrôle et d'une fonction de pilotage trapézoïdal, qui lui permet de prendre en charge des moteurs sans capteurs à effet Hall.
Vous pouvez utiliser deux des trois canaux du contrôleur de façon indépendante ou synchronisée pour diriger un appareil mobile. La connexion par bus CAN permet de relier jusqu'à 127 contrôleurs Roboteq avec une seule paire torsadée. Le modèle SDC 3260 dispose d'entrées et sorties analogiques, numériques et d'impulsions que vous pouvez réattribuer en fonction de vos besoins.
Le contrôleur Roboteq tricanal SDC 3260 s'adapte à de nombreux modes de communication pour convertir vos commandes. Pilotez-le par le biais d'un signal radiocommandé, d'un PC relié par USB ou RS232, d'un joystick analogique, ou encore d'un API.
Programmez votre contrôleur en utilisant de simples scripts en MicroBasic. Vous pouvez éditer et compilez ces scripts en vous servant de l'utilitaire PC Roborun+. Une version professionnelle est disponible s'il est nécessaire de produire plus de 50 lignes de code source.
Nous mettons à votre disposition une bibliothèque complète de ressources pour le contrôleur Roboteq SDC 3260. Servez-vous !