

Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Le servomoteur Dynamixel M42P-010-S260-R à connexion RS485 fait partie de la série Dynamixel-P conçue par Robotis. Encore plus précis et puissant, il offre un design et une durée de vie améliorés.
Entièrement programmable, le servomoteur Dynamixel-P M42P-010-S260-R se compose d’un moteur CC, d’un engrenage réducteur, d’un contrôleur de moteur, d’un pilote et d’un réseau. Il permet de vastes possibilités en termes de contrôle et de feedback et s’inscrit comme un servo d’excellence, notamment en raison de son moteur Maxon haute qualité.
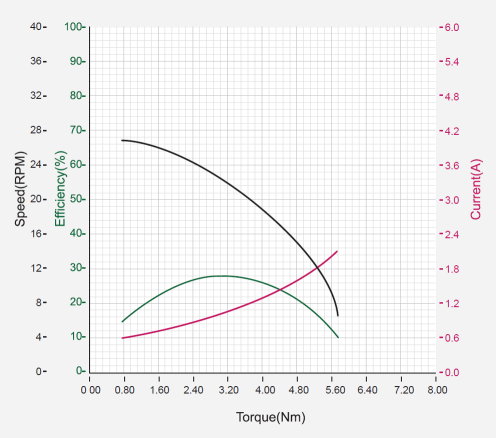
Le servomoteur M42P-010-S260-R intègre notamment le contrôle du couple par la mesure du courant et la table de contrôle des séries X, et permet la maîtrise du couple, de la vitesse ou encore de la position. La combinaison d’un encodeur absolu sans contact et d’un encodeur incrémental lui confère une précision supérieure.
Cette version revue et corrigée du M42-010-S260-R inclut de nouvelles améliorations, notamment en ce qui concerne l’architecture de l’ensemble motoréducteur :
Le servomoteur Dynamixel M42P-010-S260-R a de plus été étudié pour réduire son temps de réponse, faisant de ce module un atout précieux pour toutes sortes d’applications robotiques : rapide, précis, modulable et résistant.
Retrouvez ici la documentation complète qui vous permettra de maîtriser en un temps record votre servomoteur Dynamixel M42P-010-S260-R :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel M42P-010-S260-R à connexion RS485 fait partie de la série Dynamixel-P conçue par Robotis. Encore plus précis et puissant, il offre un design et une durée de vie améliorés.
















