

Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,10 € d'éco-participation
Le servomoteur Dynamixel-P M54P-060-S250-R est conçu pour satisfaire les roboticiens les plus ambitieux, à la recherche d'un servo ultra précis, rapide, entièrement configurable et durable. Bref, une authentique bête de course pour vos projets les plus complexes.
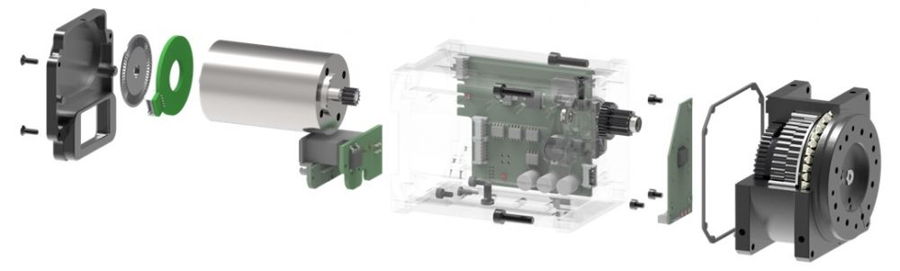
Nouveau venu dans la galaxie Robotis, le servomoteur Dynamixel M54P-060-S250-R appartient à la série Dynamixel-P, une nouvelle génération de servomoteurs dotés d'un double encodeur incrémental et absolu sans contact. Vous obtenez ainsi une résolution supérieure de 100 % au modèle équivalent issu de la gamme Dynamixel-P. Le temps de réponse connaît également une amélioration notable.
Comme tous les modèles Dynamixel-P, ce servomoteur à connexion RS485 bénéficie d'une connectique JST et d'une conception de haute qualité en métal précieux, favorisant la dissipation thermique, la réduction du bruit, et augmentant sa durée d'utilisation.
De telles performances s'ajoutent aux fonctionnalités déjà bien connues des utilisateurs de servos Dynamixel : multiples modes de contrôle -dont le contrôle du PWM-, possibilités de programmation quasi-inépuisables, etc. On obtient donc l'un des servomoteurs les plus performants du marché de la robotique grand public, adapté aussi bien à la conception en amateur qu'aux exigences de la recherche et de l'industrie.
Le servomoteur Dynamixel-P M54P-060-S250-R offre de plus différentes configuration de montage avec l'équipement adapté, également disponible sur notre site. Robot humanoïde, manipulateur pour la recherche, système vidéo robotisé, engin mobile autonome ne sont que quelques-uns des projets réalisables avec ce servomoteur intelligent, polyvalent, léger et économe en énergie.
Nous laissons à votre disposition toutes les ressources nécessaires à l'exploitation de votre servomoteur Dynamixel M54P-060-S250-R :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel-P M54P-060-S250-R est conçu pour satisfaire les roboticiens les plus ambitieux, à la recherche d'un servo ultra précis, rapide, entièrement configurable et durable. Bref, une authentique bête de course pour vos projets les plus complexes.

















