Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
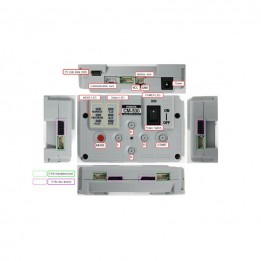
La carte OpenCR 1.0 s'utilise aussi bien comme un contrôleur de robot open source (pour TurtleBot3 par exemple), que comme un microcontrôleur avec son processeur 32 bits avec FPU, cadencé à 216 MHz. Ce qui signifie que vous accédez à l'intégralité des codes de programmation, des schémas, des logiciels et du matériel conçu pour la plateforme d'éducation TurtleBot 3.
Ce robocontrôleur et microcontrôleur open source prend en charge la communication RS-485 et TTL (pour servos Dynamixel R et T), mais aussi les protocoles UART et CAN. Il intègre également un circuit USB, et un connecteur 18 pins GPIO pour développer votre projet.
Outre la possibilité de connecter de nombreux modules périphériques à votre carte ROS, la carte OpenCR 1.0 embarque une centrale de mouvement inertielle 9 axes (gyroscope, accéléromètre et magnétomètre 3 axes) pour un contrôle accru de la position, de la rotation, de l'altitude et de la vitesse de votre robot mobile. 2 boutons et 4 LEDs utilisateur viennent complèter ce tableau déjà alléchant, ainsi qu'une sortie pour LED rouge/verte pour indiquer le statut de la communication USB.
Inclus :
Besoin d'autres informations sur votre contrôleur OpenCR 1.0 ? Ne bougez pas, elles sont toutes là !
Anonymous A. publié le 24/03/2021 suite à une commande du 14/03/2021
Non testé pour l'instant, dommage que la connectique des péripheriques ne soit pas livrée avec la carte
Anonymous A. publié le 31/07/2018 suite à une commande du 21/07/2018
Une plateforme bien conçue et très pratique
Anonymous A. publié le 31/07/2018 suite à une commande du 22/07/2018
A ce prix on s'attend à recevoir l'alimentation secteur. Ce n'est pas le cas. Le descriptif sur le site ne le précise pas. Je travaille avec d'autres cartes moins chéres qui elles possédent l'alimentation secteur.
Commentaire de Génération Robots le 17/08/2018
Bonjour,
Tout d'abord, merci d'avoir pris le temps d'écrire votre avis sur notre site. Le constructeur vend la carte sans alimentation, laissant à l'utilisateur le choix d'utiliser une alimentation branchée sur le secteur, ou bien une batterie (pour faire de l'embarqué). Nous avons donc répercuté ce choix sur notre fiche produit.
Cependant, nous venons de rajouter le chargeur secteur, la batterie et son chargeur, dans la liste des accessoires de la carte OpenCR 1.0, suite à votre commentaire.
Cordialement, l'équipe Génération Robots
 Voir les échanges
Masquer les échanges
Voir les échanges
Masquer les échanges