Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,02 € d'éco-participation
Le servomoteur Dynamixel XL430-W250-T à interface TTL se classe dans la catégorie des servomoteurs "low cost" : il offre toutefois une grande souplesse de montage et d'utilisation, et un design compact pour toutes vos créations de petite taille.
Si le servomoteur Dynamixel XL430-W250-T de Robotis s'adresse aux budgets plus modestes, il n'en garde pas moins les très belles qualités offertes à la série X de Dynamixel : un contrôle de la vitesse et de la position à 360° avec son encodeur magnétique sans contact et une efficacité accrue (le temps de réalisation des opérations est réduit pour économiser l'énergie). Ainsi, ce petit servo utilise une puissance de 40 mA au lieu des 100 mA des modèles antérieurs. Il est compatible avec tous les modèles de la série X-430 (XM et XH), avec lesquels il partage la même structure mécanique.
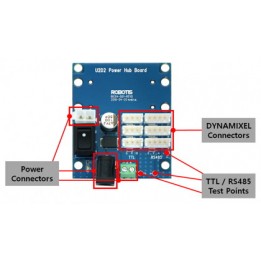
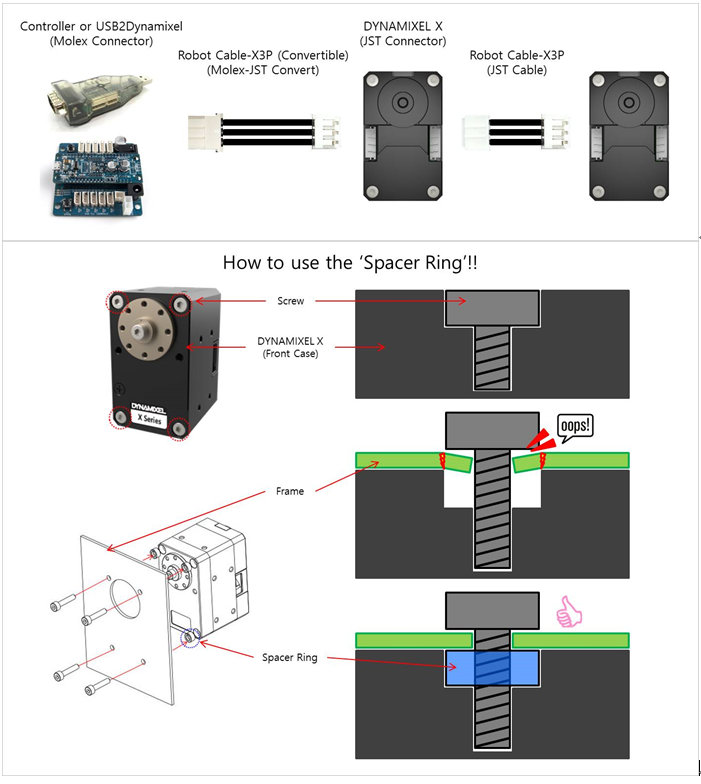
Comme toujours, vous pouvez piloter votre servomoteur Dynamixel depuis votre PC (Windows, Mac ou Linux) avec un module USB2Dynamixel, un connecteur U2D2 ou un microcontrôleur adapté (voir ci-dessous la liste des composants nécessaires) :
Retrouvez 6 modes de fonctionnement, le contrôle en profilé, ainsi que le suivi de nombreuses données telles que la vitesse, la position, la trajectoire, etc.
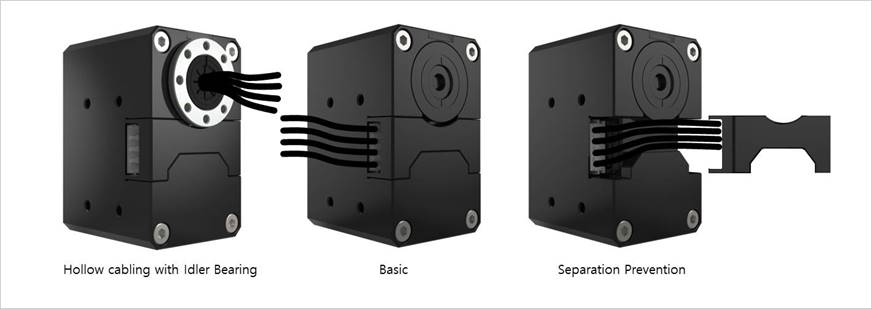
Le dos du boîtier de ce servo Robotis est creux, et permet différentes configuration de câblage pour le positionner de la meilleure façon possible selon votre projet. Le vissage s'opère sans risque ni efforts, directement sur le boîtier, grâce au "spacer ring".
Son boîtier en aluminium limite efficacement la dissipation thermique.
Inclus :
Retrouvez les informations complètes liées au servomoteur XL430-W250-T en consultant ce lien :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.
Anonymous A. publié le 31/08/2023 suite à une commande du 21/08/2023
Très bon produit correspondant à la description
Anonymous A. publié le 25/02/2022 suite à une commande du 15/02/2022
Moteur à prix abordable avec caractéristiques très proches du haut de gamme ... parfait pour apprendre.
Anonymous A. publié le 27/03/2019 suite à une commande du 06/03/2019
Tres bon servo pour des testes J’ai remarqué qu’il y avait une erreur dans le robotis manager, il indiqué que l’on peut selectionner le mode controle en couple, alors que le XL ne le permet pas.

Le servomoteur Dynamixel XL430-W250-T à interface TTL se classe dans la catégorie des servomoteurs "low cost" : il offre toutefois une grande souplesse de montage et d'utilisation, et un design compact pour toutes vos créations de petite taille.