

Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
Disponible ici en 24 V et en connexion RS485, le servomoteur Dynamixel XH430-V350-R est un petit bijou intégrant toutes les fonctionnalités dont rêvent les roboticiens pointilleux. Il s'adapte à toutes vos idées de création !
100 % programmable via le logiciel RoboPlus –téléchargeable ci-dessous pour Windows, Linux ou Mac-, le servomoteur Dynamixel XH430-V350-R vous laisse toutes ses clés. Vous disposez ainsi de 6 modes de contrôle incluant le contrôle en PWM, extrêmement utile si vous envisagez de construire un engin mobile radiocommandé. Différents types de microcontrôleur vous permettent de piloter votre servomoteur Robotis, dont la clé USB2Dynamixel également en vente sur notre site.
Vous avez également la maîtrise totale de l'assemblage de votre servomoteur : à l'arrière, vous pouvez disposer les câbles de branchement de 3 façons différentes, et choisir librement les supports de montage dont vous avez besoin, parmi toute une gamme compatible.
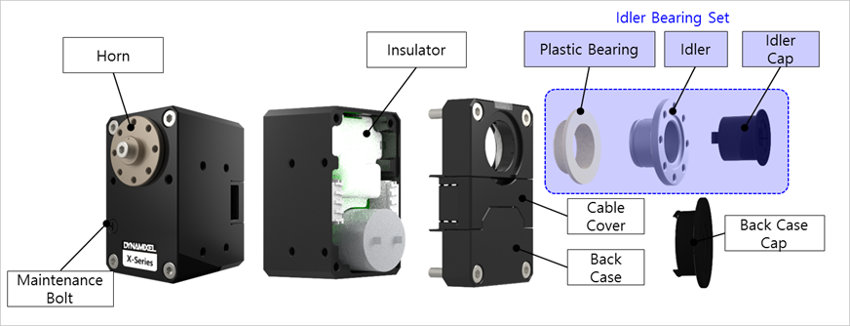
Les servomoteurs Dynamixel de la série XH, non contents de faire partie des servos de haute performance, offrent un packaging exemplaire : un boîtier en plastique d'ingénierie et en aluminium, pour favoriser la dissipation thermique, des rouages intégralement en métal, une ergonomie repensée pour limiter l'usure des câbles de branchement…
Le servomoteur Dynamixel XH430-V350-R est à la fois un composant indispensable, et un très bel objet avec lequel vous passerez de nombreuses années !
Inclus avec le servomoteur Dynamixel XH430-V350-R :

Le Servomoteur Dynamixel XH430-V350-R est largement à votre portée avec la liste de ressources que nous avons rassemblée pour vous !
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Disponible ici en 24 V et en connexion RS485, le servomoteur Dynamixel XH430-V350-R est un petit bijou intégrant toutes les fonctionnalités dont rêvent les roboticiens pointilleux. Il s'adapte à toutes vos idées de création !










































