

Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Grazie alla nostra partnership con The Construct, un'azienda rinomata per i suoi corsi di formazione e online, potrete imparare a far interagire il vostro manipolatore con il suo ambiente utilizzando ROS.
Manipolazione ROS è il termine usato per descrivere qualsiasi robot che manipola qualcosa nel suo ambiente. L'obiettivo principale di questo corso è quello di farvi conoscere gli strumenti essenziali per comprendere il funzionamento della manipolazione ROS e insegnarvi ad applicarli a qualsiasi robot manipolatore.

Livello intermedio
13 ore
17 esercizi
4 robot utilizzati :
Creare un pacchetto MoveIt per consentire al braccio manipolatore di eseguire la pianificazione del movimento.
Pianificare ed eseguire traiettorie per il robot utilizzando MoveIt
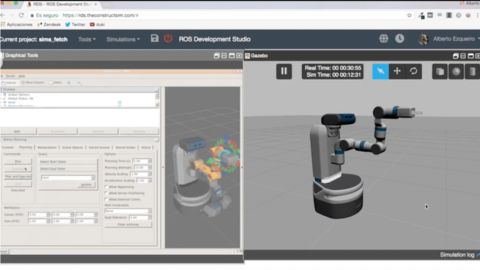
Pianificare i movimenti in modo programmatico
Fare in modo che il braccio del robot rilevi e afferri un oggetto
Unità 1: Introduzione al corso
Una breve introduzione al corso, con una dimostrazione
Durata: 10 minuti
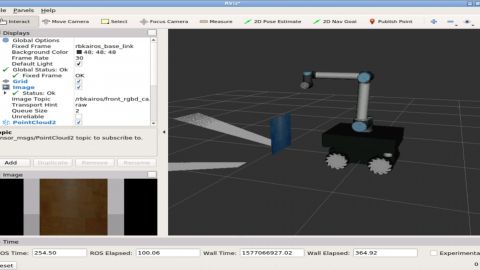
Unità 3: Pianificazione del movimento tramite interfacce grafiche, parte 1
Durata: 2 h 15 min
Unità 4: Pianificazione del movimento tramite interfacce grafiche, parte 2
2 ore
Unità 5: Eseguire la pianificazione del movimento utilizzando la programmazione
Durata: 2 ore
Durata: 2 ore
Durata: 2 ore
Se siete interessati a questo corso, è sufficiente effettuare l'ordine online dalla pagina del prodotto. Una volta effettuato l'acquisto, riceverete entro 24 ore lavorative il link alla piattaforma dove si trova il corso e i dati di accesso validi per 1 anno.
Nota bene:
Rinomata per i suoi corsi pratici di robotica e ROS, The Construct è una piattaforma di e-learning che sviluppa competenze di robotica attraverso un curriculum completo. The Construct offre corsi di formazione, corsi online e anche corsi su misura.
I corsi di The Construct sono adatti a un ampio pubblico:


Grazie alla nostra partnership con The Construct, un'azienda rinomata per i suoi corsi di formazione e online, potrete imparare a far interagire il vostro manipolatore con il suo ambiente utilizzando ROS.