")
")
")
")
")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
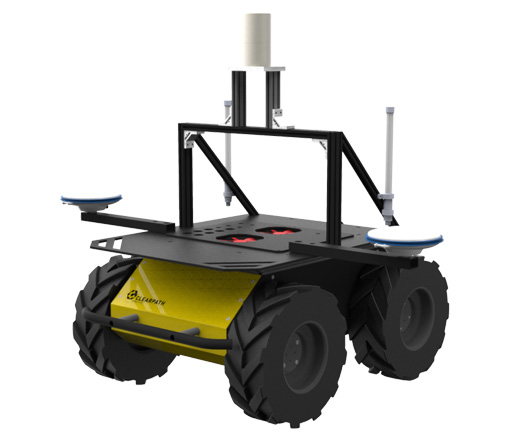
L'utilizzo del robot Husky A200 è stato semplificato per programmare sistemi autonomi e connessi, grazie al sistema operativo open-source Robot Operating System (ROS) e a LabVIEW Robotics di National Instruments.
![]()
Husky A200™ è stato il primo rover di esplorazione robotica outdoor a supportare ROS. Troverai dimostrazioni e tutorial, oltre a esperti con interessi comuni che condividono il loro know-how all'interno della comunità ROS, che ti aiuteranno ad avviare il tuo progetto rapidamente e senza problemi.
Sentiti libero di utilizzare la fornitissima libreria di esempi liberamente disponibili per iniziare e vieni a confrontare i tuoi progressi con quelli di altri utenti della grande comunità di robot mobili Husky A200™.
Husky A200™ utilizza un protocollo seriale open source. Avrai accesso a tutte le variabili e non perderai tempo a cercare informazioni protette dal sistema. Il produttore Clearpath Robotics fornisce il supporto API per ROS e opzioni per C++ e Python sul robot mobile Husky.
Cosa c'è di più fastidioso che dover cambiare hardware quando si verifica un cambiamento del progetto in corso? Le modifiche apportate al tuo robot Husky saranno un gioco da ragazzi grazie alla strumentazione modulare del carico utile, al facile accesso all'alimentazione a 5/12/24 V e agli ingressi/uscite riconfigurabili. La prototipazione di una base mobile non è mai stata così rapida e semplice.
Molti droni terrestri Husky A200™ sono già stati adottati dalle seguenti prestigiose istituzioni:
La base mobile Husky A200 è stata progettata con un'architettura scalabile che la rende la piattaforma ideale per sviluppare sistemi di prova e sviluppo su più robot contemporaneamente.
È possibile modificare lo stato del robot Husky grazie ai parametri di controllo del veicolo adattabili, alle misurazioni odometriche di alta precisione e al sistema diagnostico.
La base mobile Husky A200 può essere facilmente interfacciata con un'ampia gamma di manipolatori e pinze industriali per il funzionamento da remoto e le attività di movimentazione.
La base robotica mobile Husky A200 è pronto all'uso per tutte le operazioni di teleoperazione. È sufficiente collegare il joystick wireless per iniziare.

Di seguito sono riportati i documenti relativi alla base mobile outdoor Husky A200.
Lo Starter Package di Husky comprende i componenti di base. Viene fornito con un mini-ITX preinstallato compatibile con Linux e ROS, mentre la piastra superiore facilita il montaggio di qualsiasi apparecchiatura di rilevamento, manipolazione o calcolo. Per iniziare, è sufficiente collegare i sensori al computer di bordo e agli alimentatori Husky regolati.

Questo package top di gamma è ideale per la mappatura e la navigazione 3D su larga scala. Questo Husky è dotato di un sistema di navigazione Novatel Inertial-GNSS strettamente accoppiato con un giroscopio a fibre ottiche per un posizionamento preciso anche con segnali GPS intermittenti. Le doppie antenne consentono di determinare con precisione la direzione reale in base al GPS, mentre un LIDAR 3D 32 Velodyne fornisce una percezione dettagliata dell'ambiente del robot. L'aggiornamento della batteria al litio aumenta l'autonomia.
Questo package top di gamma è ideale per la mappatura e la navigazione 3D su larga scala. Questo Husky è dotato di un sistema di navigazione Novatel Inertial-GNSS strettamente accoppiato con un giroscopio a fibre ottiche per un posizionamento preciso anche con segnali GPS intermittenti. Le doppie antenne consentono di determinare con precisione la direzione reale in base al GPS, mentre un LIDAR 3D 32 Velodyne fornisce una percezione dettagliata dell'ambiente del robot. L'aggiornamento della batteria al litio aumenta l'autonomia.

")