Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
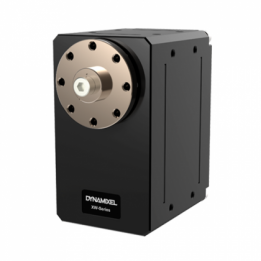
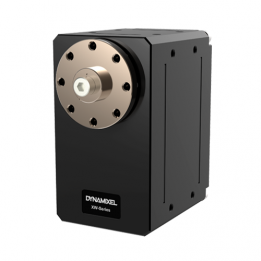
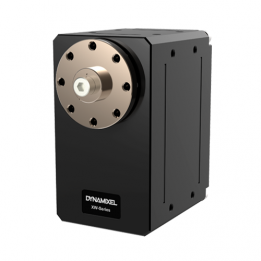
Il servomotore Dynamixel XW430-T200-R con connessione RS485 combina un dispositivo impermeabile al 100% con una coppia di media potenza, che consente di raggiungere una certa velocità se necessario.
Cerchi un servomotore efficiente per creare il tuo prossimo drone marino o subacqueo? La particolarità di questo servomotore è la sua notevole resistenza all'immersione. Totalmente impermeabile alla polvere, può essere immerso a 1 m di profondità per un giorno intero!
Il suo grado di protezione IP 68 lo rende uno dei servomotori più impermeabili dell'intera gamma Dynamixel :
Se vuoi pilotare una macchina in grado di muoversi sulla terra e sull'acqua, o addirittura un sottomarino, dovrai fare affidamento su tutte le risorse del tuo servomotore. Con Dynamixel XW430-T200-R, ce ne sono molte:
Trovate le informazioni giuste sul servo Dynamixel XW430-T200-R con questo elenco di link compilato appositamente per voi:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XW430-T200-R con connessione RS485 combina un dispositivo impermeabile al 100% con una coppia di media potenza, che consente di raggiungere una certa velocità se necessario.