Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
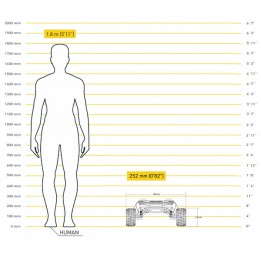
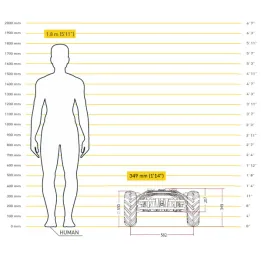
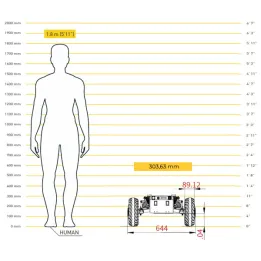
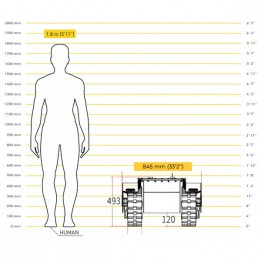
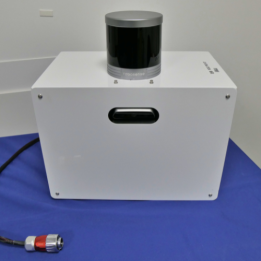
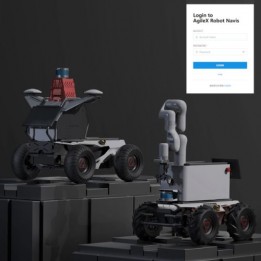
Il kit Agilex Autopilot fornisce un sistema completo per la navigazione GPS autonoma di un telaio robotico ad alte prestazioni. Programmabile su Linux, è una piattaforma 100% ROS per lo sviluppo di un'ampia gamma di applicazioni.
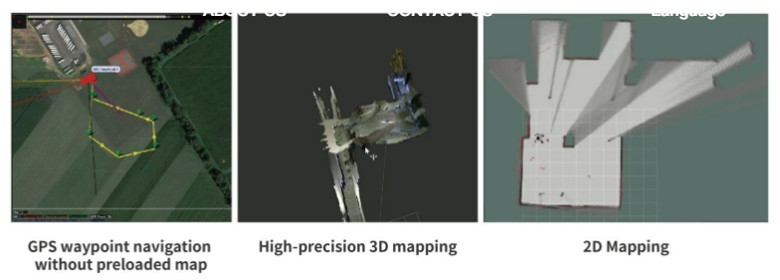


Il kit Agilex Autopilot fornisce un sistema completo per la navigazione GPS autonoma di un telaio robotico ad alte prestazioni. Programmabile su Linux, è una piattaforma 100% ROS per lo sviluppo di un'ampia gamma di applicazioni.