")
")
")
")
")
")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
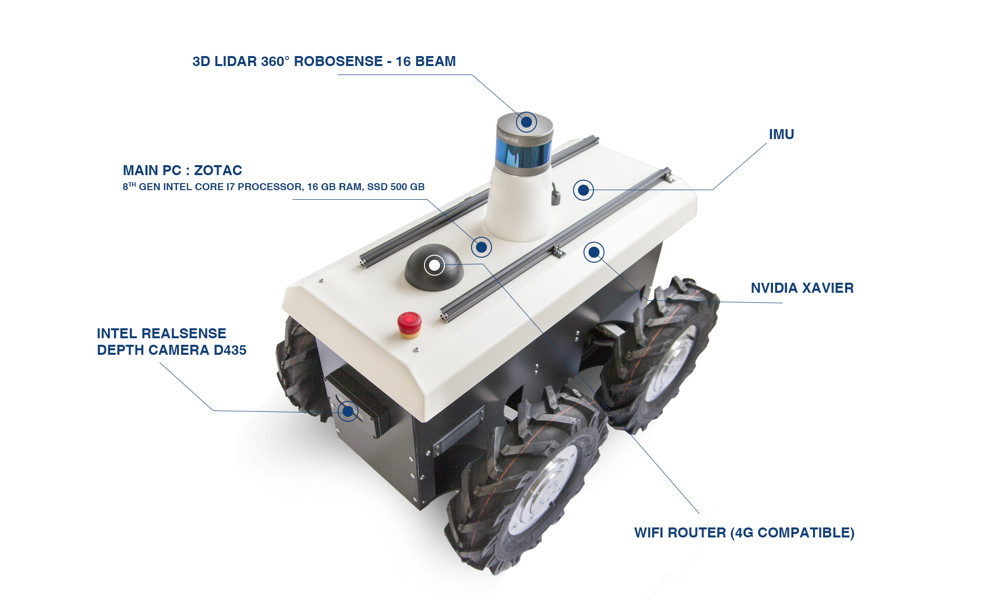
Il robot mobile Shadow Runner RR100 EDU è una piattaforma mobile per esterni compatibile con ROS e dedicata alla ricerca e all'istruzione superiore. Progettato e prodotto a Bordeaux dagli ingegneri di Génération Robots, Shadow Runner è un robot resistente a tutti i terreni e alle intemperie. Il suo grande punto di forza? È dotato di sensori ad alte prestazioni ed è compatibile con ROS.
Scelta di 3 o 5 motori
Con oltre 10 anni di esperienza nella robotica avanzata applicata a diversi settori (agricoltura, aeronautica, nucleare, sicurezza, ecc.), gli ingegneri di Génération Robots hanno deciso di progettare e produrre il loro primo robot mobile per la ricerca e la didattica.
Shadow Runner RR100 è una piattaforma robotica mobile per esterni di medie dimensioni, dotata di ruote agricole e di un doppio sistema di sterzo di tipo Ackermann , che gli consente di affrontare molti tipi di terreno.
Abbiamo dotato il robot RR100 di sensori ad alte prestazioni, che consentono di utilizzarlo o personalizzarlo rapidamente per un'ampia gamma di progetti. Il robot non è dotato di navigazione integrata, quindi spetta a te installare le librerie ROS di tua scelta. Forniamo un robot in cui i sensori e il PC sono integrati , Linux e ROS sono installati sul PC, così come i driver dei motori. Il robot è quindi completamente aperto in modo che tu possa installare le tue librerie ROS , con tutti i sensori e gli attuatori accessibili.
Abbiamo progettato questo robot per facilitare l'integrazione del tuo software. Sono disponibili schemi elettrici e meccanici e si ha accesso all'intero PC.
Vuoi vedere l'RR100 in azione? Prendi subito un appuntamento!
Il robot di ricerca mobile RR100 è completamente compatibile con ROS. Questa compatibilità è garantita anche per ogni componente incluso nel robot.
La piattaforma mobile RR100 viene fornita con un proprio PC, preinstallato e lanciato automaticamente all'avvio:
Nodi ROS necessari per raccogliere i dati dai sensori di bordo (3D LiDAR , Stereo Camera, GPS e IMU )
Il robot RR100 EDU viene consegnato con ROS Noetic preinstallato. L'installazione, eseguita dai nostri ingegneri robotici, comprende:
Insieme al robot viene fornita una chiavetta USB contenente la libreria di driver ROS necessari per installare le 3 funzioni di cui sopra , nonché una guida per l'utente per l'installazione e la configurazione di questi driver ROS.
Per personalizzare il robot e aggiungere altre funzioni, ti invitiamo a scaricare e installare il pacchetto ROS di tua scelta (mappatura, localizzazione, navigazione).
Di seguito troverete un elenco delle librerie open source attualmente disponibili:
| Mapping | Localizzazione | Navigazione |
|---|
| 3D | LeGO-LOAM Cartographer HDL Graph SLAM |
HDL Localization MCL 3D Cartographer |
Move Base Move Base Flex |
| 2D | Gmapping Hector SLAM |
AMCL | Move Base Move Base Flex |
In alternativa, i nostri tecnici possono aiutarti a scegliere e installare i driver ROS:
Si tratta di un servizio opzionale, quindi non esitare a contattarci per conoscere i nostri prezzi e ciò che può essere incluso in questo supporto à la carte.
Il robot RR100 è dotato di sensori ad alte prestazioni, pronti a raccogliere e riportare tutti i tipi di dati ambientali.
Ecco l'elenco dei sensori di cui abbiamo scelto di dotare l'RR100:
LiDAR, IMU, fotocamera e GPS sono compatibili con ROS e sono stati installati dai nostri ingegneri. Sono pronti a partire! Tutti i driver e i nodi ROS si trovano sulla chiave USB fornita con il robot.
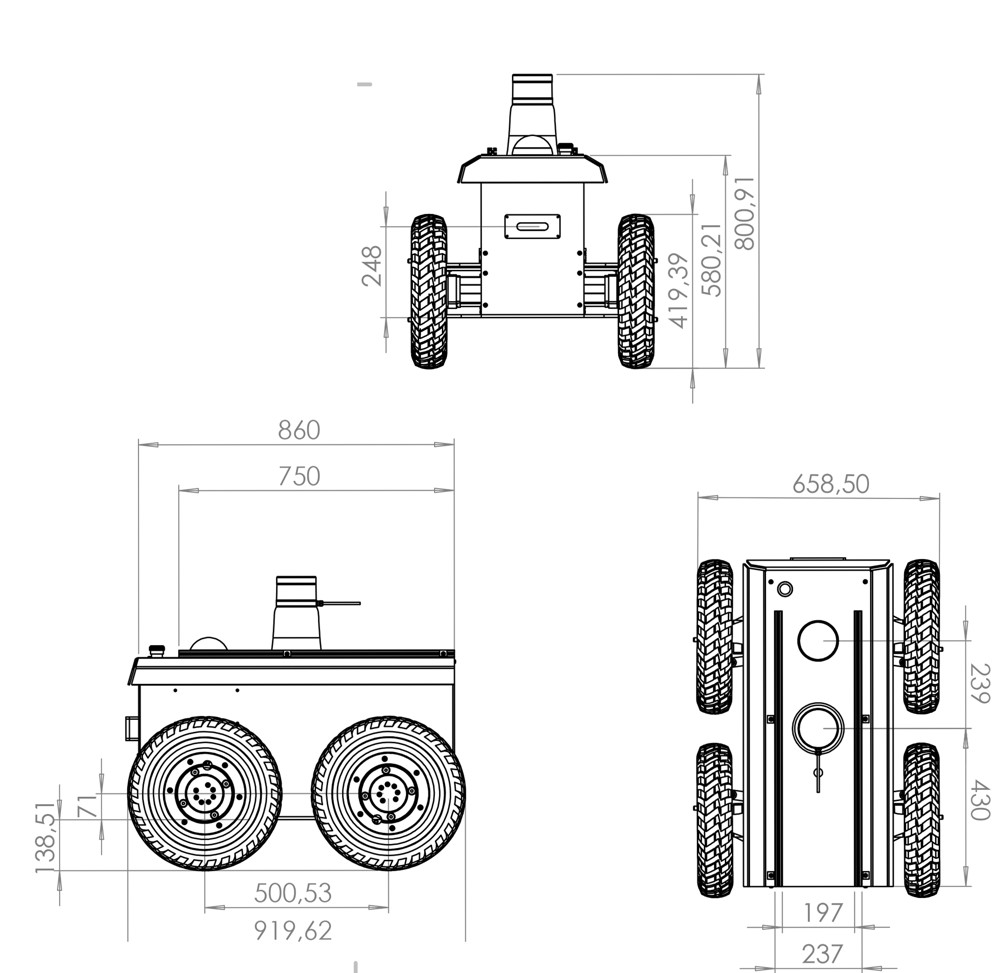
Nonostante le sue dimensioni, il robot mobile RR100 è in grado di navigare facilmente in spazi ristretti, grazie al suo doppio sistema di sterzo Ackerman, che gli consente un raggio di sterzata di 50 cm.
È dotato di una serie di sensori per un posizionamento preciso.
L'autonomia di navigazione è ulteriormente rafforzata da una batteria di lunga durata (5 ore) e da una ricarica rapida (1 ora e 20 minuti).
Una delle caratteristiche peculiari della base mobile RR100 è il doppio sistema di sterzo Ackerman, che riduce notevolmente l'usura dei pneumatici, consuma meno energia e offre al robot un raggio di sterzata di 50 cm.
Ciò significa che l'RR100 può muoversi in spazi ristretti e affrontare terreni irregolari con maggiore facilità.
2 Dunkermotoren BG 75X50 con freni integrati sono utilizzati per un arresto di emergenza ottimale e per l'utilizzo del robot in modalità di parcheggio. Poiché i freni non devono essere alimentati, il robot può rimanere fermo su un pendio, ad esempio, e non si muove.
Un'altra caratteristica speciale del robot RR100 è la batteria a relè. Oltre alla batteria al litio, il robot dispone di due batterie al piombo, che subentrano quando la batteria viene sostituita a caldo. L'operatore ha quindi 5 minuti per sostituire la batteria al litio scarica con una carica.
Questo sistema presenta tre vantaggi:
Abbiamo fatto in modo che all'interno del telaio del robot ci sia spazio sufficiente per ospitare una serie di componenti aggiuntivi. Infine, sono disponibili 4 porte USB e 4 porte Ethernet per le tue connessioni.
È inoltre possibile installare sensori e attuatori sulla struttura del robot, che ha un carico utile di 100 kg (con l'opzione di 5 motori).
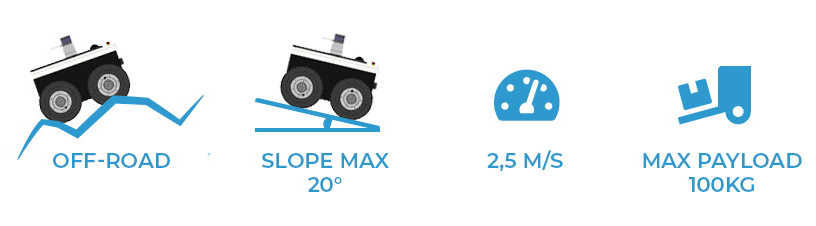
Estremamente robusto , progettato per l'uso all'aperto in tutte le condizioni atmosferiche (IP 54 ), con una velocità di 2 ,5 m/s e un peso di 90 kg, l'RR100 può scalare pendenze di 20° e superare ostacoli alti 13 cm.
Lo abbiamo dotato di ruote agricole in grado di affrontare terreni difficili (fango, dossi e avvallamenti, pendenze, ecc.). Su richiesta, possiamo adattare le ruote lisce per gli ambienti urbani o per l'uso interno.
Il robot è costruito su un telaio all-terrain con doppi triangoli e lunga corsa, con 4 ruote motrici e sterzanti Ackerman doppie. Il robot non ha sospensioni.
Grazie al telemetro laser 3D, il robot può localizzare punti specifici in 3 dimensioni ed effettuare misurazioni specifiche (ad esempio, puntare una telecamera termica). Questo settore dell'ispezione industriale fornisce numerose informazioni tecniche su un sito industriale (ad esempio, nel settore dell'energia), consentendo di realizzare un modello del sito di produzione. L'ispezione automatica può essere utilizzata anche per la manutenzione preventiva.
La sicurezza perimetrale degli edifici è un altro caso d'uso ben noto per questi robot. Il robot RR100 può essere utilizzato per pattugliare automaticamente gli edifici. Dotato dei giusti sensori, il robot può individuare persone o veicoli all'interno dell'edificio e dare l'allarme in caso di rilevamento di un intruso.
")
Il robot mobile Shadow Runner RR100 EDU è una piattaforma mobile per esterni compatibile con ROS e dedicata alla ricerca e all'istruzione superiore. Progettato e prodotto a Bordeaux dagli ingegneri di Génération Robots, Shadow Runner è un robot resistente a tutti i terreni e alle intemperie. Il suo grande punto di forza? È dotato di sensori ad alte prestazioni ed è compatibile con ROS.
Scelta di 3 o 5 motori


















