")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
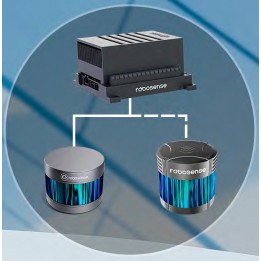
RS-Fusion-P3 di Robosense è un sistema completo e avanzato di rilevamento degli ostacoli che integra due LIDAR-16 e un LIDAR-32 per sviluppare un sistema di navigazione autonomo.
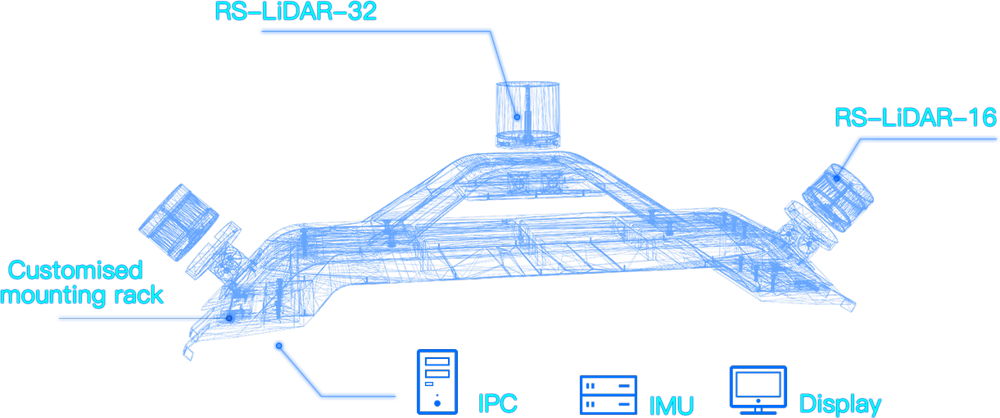
Con tre sistemi di rilevamento LIDAR a 16 e 32 raggi, un'unità di controllo IMU e un sistema di comunicazione interprocesso, questo nuovo sistema di ausilio alla navigazione offre una delle soluzioni più complete del mercato.
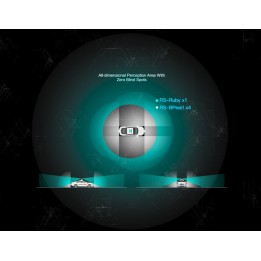
In concreto, il sistema è in grado di raccogliere, sincronizzare e analizzare le informazioni raccolte da un totale di 64 coppie di raggi laser: 16 coppie per i 2 RS-LIDAR-16 , 32 coppie per il rilevatore centrale RS-LIDAR-32 .
Progettato per la ricerca e l'istruzione superiore, può essere utilizzato per la mappatura ad alta definizione, la localizzazione in tempo reale, il rilevamento di ostacoli e corsie stradali e il tracciamento di oggetti dinamici.
La percezione simultanea di più punti aumenta la precisione e la risoluzione del sistema, consentendo di ridurre al minimo gli angoli morti.
RS-Fusion-P3 comprende una soluzione completa per centralizzare , elaborare e sincronizzare le informazioni rilevate sulla strada. L'innovazione di Robosense facilita la progettazione di sistemi di navigazione autonomi grazie a questo dispositivo all-in-one.
La soluzione di rilevamento comprende un software di calibrazione multi-punto, un servizio di installazione e una soluzione di apprendimento per familiarizzare gli utenti con l'apparecchiatura. Il sistema è stato sottoposto a numerosi test sul campo per dimostrarne l'efficacia e l'efficienza.
Trovate tutte le risorse relative alla soluzione RS-Fusion-P3:
")
RS-Fusion-P3 di Robosense è un sistema completo e avanzato di rilevamento degli ostacoli che integra due LIDAR-16 e un LIDAR-32 per sviluppare un sistema di navigazione autonomo.