Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Il piccolo robot mobile Leo Rover viene svelato dalla A alla Z in questo kit di costruzione. Leo Rover Developer Kit contiene tutto il necessario per assemblare il robot. Dotato di una scheda Raspberry Pi, di un potente controller e di un ambiente software basato su ROS, è pronto per essere programmato!
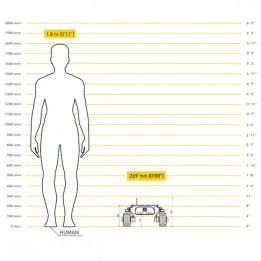
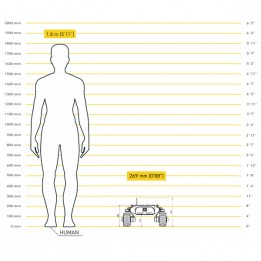
Leo Rover è una piattaforma robotica mobile open-source basata su ROS e su Raspberry Pi 4. Può gestire fino a 5 kg di carico. Può gestire fino a 5 kg di carico. In pratica, questo significa che sei libero di personalizzarlo con ogni accessorio immaginabile: pinza o braccio robotico , telecamera, sensori, IMU , ecc.

Con il Leo Rover Developer Kit, gli insegnanti possono fornire ai loro studenti un kit contenente tutti i materiali necessari per assemblare il robot.
Questo kit consente di assemblare rapidamente la piattaforma, fornendo al contempo una visione approfondita del funzionamento del robot.
Tutto ciò che serve sono alcune chiavi a brugola e a testa esagonale piatta, una morsa da banco e un saldatore.
Open Source, questo kit di robot mobili a 4 ruote motrici consente di sviluppare innumerevoli componenti aggiuntivi. Si va dalle parti robotiche da stampare in 3D a nuove applicazioni robotiche. Inoltre, puoi contare su una vasta comunità di inventori per migliorare il vostro progetto.

Il kit Leo Rover Developer può essere adattato a tutti i tuoi progetti didattici: controllo remoto, navigazione intelligente, sorveglianza ed esplorazione, stazione meteorologica mobile, ecc.
Ruote
Batteria
Fotocamera
Rete
Video unboxing del robot mobile Leo Rover
Tutto ciò di cui hai bisogno per saperne di più sul tuo Leo Rover è disponibile qui in open source!

Il piccolo robot mobile Leo Rover viene svelato dalla A alla Z in questo kit di costruzione. Leo Rover Developer Kit contiene tutto il necessario per assemblare il robot. Dotato di una scheda Raspberry Pi, di un potente controller e di un ambiente software basato su ROS, è pronto per essere programmato!