Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,02 € per l'ecotassa
Il servomotore Dynamixel 2XL430-W250-T offre due assi di controllo per le articolazioni complesse delle tue creazioni robotiche. È compatibile con i modelli XL430, XM430 e XH430.
Il servomotore Dynamixel 2XL430-W250-T è un servomotore Dynamixel Robotis a doppio asse che offre 2 gradi di libertà. A ciascun asse è assegnato un indirizzo specifico, che consente di realizzare molteplici applicazioni per il servomotore. La velocità di trasmissione rimane unica.
Il modello 2XL430-W250-T presenta tutte le caratteristiche dei servomotori Dynamixel della serie XL . Offre un'ampia varietà di modalità di controllo e una vasta gamma di feedback. Velocità, coppia, tensione, traiettoria: è possibile controllare tutti questi parametri tramite il pannello di controllo, garantendo alla tua creazione un controllo ultrapreciso.
Questo servo a doppio asse programmabile al 100% è realizzato con materiali di alta qualità per favorire la dissipazione del calore e garantire la longevità e la robustezza del dispositivo. Il suo design consente di montarlo in diverse configurazioni, riducendo al minimo l'usura dei cavi.

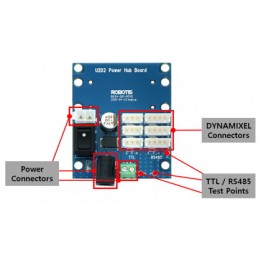
Dynamixel 2XL430-W250-T è un servomotore con connessione TTL. Per collegare il servo al suo controllore viene fornito un cavo robotico X3P da 18 cm. Tuttavia, il connettore dei servi della serie X è cambiato. Questi modelli adottano ora un connettore JST placcato in oro per garantire una comunicazione più stabile e affidabile. Se si desidera collegare il servo a un controller compatibile con la serie precedente, è necessario acquistare un cavo Molex-JST.
Il servomotore Robotis 2XL430-W250-T è compatibile con :
Le travi di sollevamento indipendenti HN11-I101 per l'adattamento di parti strutturali sono vendute separatamente.
Sfrutta tutte le risorse Dynamixel qui raccolte per avere il controllo assoluto del tuo servomotore 2XL430-W250-T:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel 2XL430-W250-T offre due assi di controllo per le articolazioni complesse delle tue creazioni robotiche. È compatibile con i modelli XL430, XM430 e XH430.