Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,05 € per l'ecotassa
Grazie alla sua coppia elevata e alle numerose opzioni di controllo, il servomotore Dynamixel XM540-W270-T con connessione TTL è la macchina ideale per i tuoi robot mobili fuoristrada e per le tue creazioni più potenti.
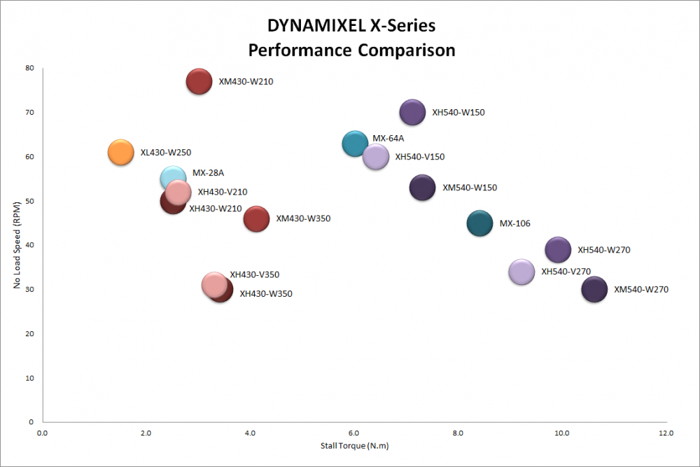
Il servomotore XM540-W270-T si distingue dagli altri modelli della serie Dynamixel-X per la sua coppia di bloccaggio estremamente potente: 10,6 N.m per un peso di soli 165 g. Questo lo rende particolarmente interessante per tutte le tue creazioni robotiche che devono sollevare carichi pesanti o conquistare terreni difficili.
Adotta le dimensioni compatte dei suoi colleghi (meno di 6 cm di altezza e 3,35 cm di larghezza) e beneficia di una connessione TTL, di un profilo ad alta efficienza energetica e di un involucro progettato per favorire la dissipazione del calore. Questo servo robusto e durevole è dotato di un motore di alta qualità e di materiali di prima scelta.
Dynamixel ha progettato una gamma di servomotori completamente programmabili e controllabili da ogni punto di vista. PWM, posizione, consumo energetico, temperatura, velocità... il feedback offerto da questo servo è, come sempre, estremamente completo. Sono disponibili 6 modalità di controllo: corrente, posizione, velocità, controllo di posizione esteso, posizione basata sulla corrente e PWM. È inoltre dotato di un controllore PID, un regolatore frequentemente utilizzato nelle applicazioni industriali.
In breve, è possibile adattare il servomotore a qualsiasi situazione, dalla prototipazione alle competizioni di robot mobili, dalla navigazione autonoma ai bracci robotici. Il servomotore Dynamixel XM540-W270-T è adatto sia per l'insegnamento e la ricerca che per lo sviluppo di soluzioni automatizzate in fabbrica.

Ecco tutto ciò che ti serve per ottenere i migliori risultati dal tuo servomotore Dynamixel XM540-W270-T:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Grazie alla sua coppia elevata e alle numerose opzioni di controllo, il servomotore Dynamixel XM540-W270-T con connessione TTL è la macchina ideale per i tuoi robot mobili fuoristrada e per le tue creazioni più potenti.