Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,02 € per l'ecotassa
Il servomotore Dynamixel XL430-W250-T con interfaccia TTL rientra nella categoria dei servomotori "a basso costo": offre tuttavia una grande flessibilità di montaggio e di utilizzo e un design compatto per tutte le tue creazioni in scala ridotta.
Il servomotore Dynamixel XL430-W250-T di Robotis si rivolge a budget più modesti, ma mantiene comunque le eccellenti qualità offerte dalla serie Dynamixel X : controllo della velocità e della posizione a 360° grazie all'encoder magnetico senza contatto e maggiore efficienza (il tempo necessario per eseguire le operazioni è ridotto per risparmiare energia). Questo piccolo servo utilizza una potenza di 40 mA invece dei 100 mA dei modelli precedenti. È compatibile con tutti i modelli della serie X-430 (XM e XH), con i quali condivide la stessa struttura meccanica.
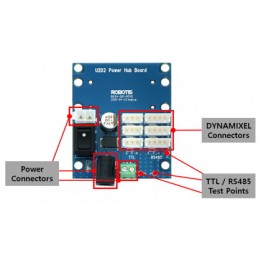
Come sempre, è possibile controllare il servomotore Dynamixel dal PC (Windows, Mac o Linux) utilizzando un modulo USB2Dynamixel , un connettore U2D2 o un microcontrollore adatto (vedere sotto per l'elenco dei componenti necessari):
Dispone di 6 modalità operative, controllo del profilo e monitoraggio dei dati di velocità, posizione, traiettoria, ecc.
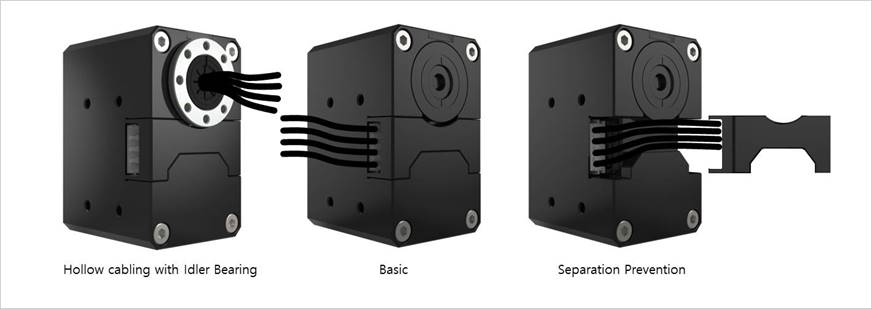
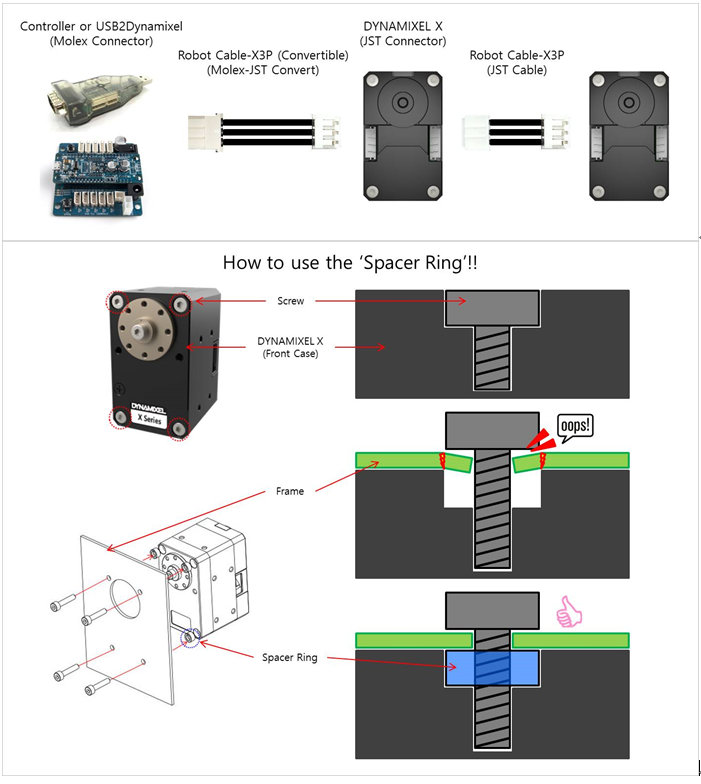
La parte posteriore dell'alloggiamento del servo Robotis è cava e consente diverse configurazioni di cablaggio per posizionarlo nel modo migliore per il tuo progetto. L'anello distanziatore consente di avvitarlo direttamente sull'alloggiamento senza rischi o sforzi.
L'involucro in alluminio limita efficacemente la dissipazione del calore.
Include :
Per informazioni complete sul servomotore XL430-W250-T, seguire questo link:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XL430-W250-T con interfaccia TTL rientra nella categoria dei servomotori "a basso costo": offre tuttavia una grande flessibilità di montaggio e di utilizzo e un design compatto per tutte le tue creazioni in scala ridotta.